IndexFiguresTables |
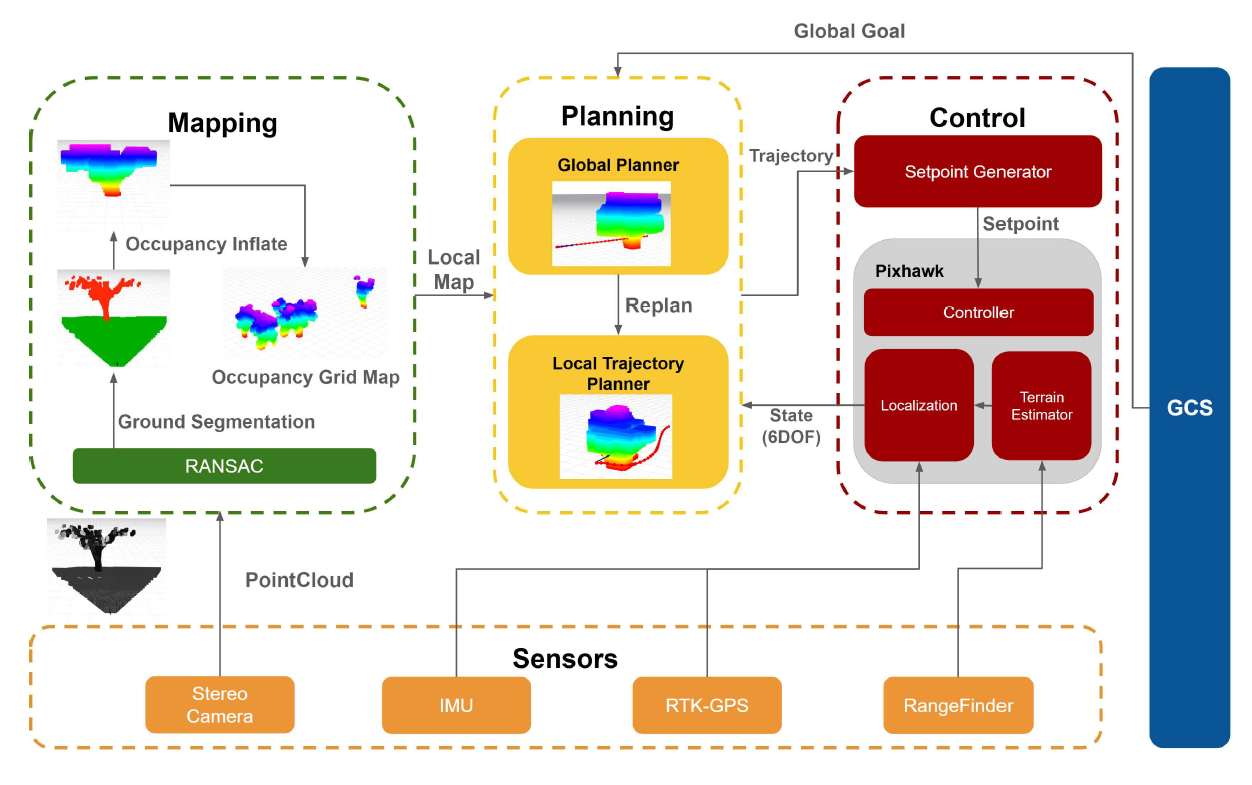
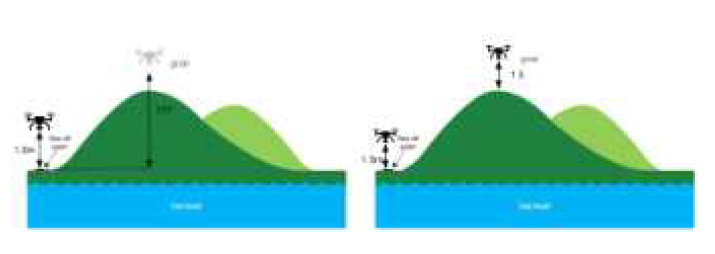
Si-woon Song , Chang-hun Ji , Min-kyu Kim , Gyeong-hun Lim , Tae-hyeon Joe and Sung-tae MoonDevelopment of a Stereo Camera-Based Autonomous Obstacle Avoidance Drone SystemAbstract: Recently, research on utilizing drones for reconnaissance, search, and rescue operations has been on the rise. The existing studies primarily rely on 3D LiDAR and precise SLAM-based systems to achieve high accuracy. However, However, they face limitations due to the weight and cost of these sensors, making them unsuitable for small drones. Additionally, these systems are often designed and validated on flat terrains, restricting their performance in complex environments. This paper proposes a cost-effective autonomous obstacle avoidance drone system that integrates stereo cameras and range sensors. As a practical alternative to expensive 3D LiDAR, the proposed system reduces sensor configuration and system complexity while enabling stable flight in challenging terrains such as slopes and forests. Additionally, by applying an obstacle inflation technique, the system achieves obstacle avoidance performance comparable to that of 3D LiDAR-based systems. The key contributions of this study are as follows. First, the system achieves 3D LiDAR-level obstacle detection and terrain tracking performance using only stereo cameras and range sensors. Second, unlike prior studies focused on flat terrains, the proposed algorithms are validated in complex environments, including steep slopes and forested areas, demonstrating robustness. Third, the system is designed based on PX4 and ROS2, ensuring high scalability and reusability by employing a consistent system across both simulations and real-world flight environments. This paper begins by analyzing the limitations of existing research, followed by a detailed explanation of the proposed obstacle detection and autonomous avoidance system's algorithms and architecture. The system’s performance is validated through both simulation and real-world flight experiments. Keywords: UAV (Unmanned Aerial Vehicle) , Stereo Camera , Range Finder , Obstacle Avoidance , Autonomous Flight , PX4-ROS2 , Ground Segmentation Ⅰ. 서 론최근 드론 기술이 급속도로 발전함에 따라, 드론을 활용한 정찰, 수색, 구조 활동 등에 대한 관심이 꾸준히 높아지고 있다.[1,2] 그러나 실제 운용 환경은 도시의 평지뿐만 아니라 나무가 울창한 숲, 경사진 지형 등 복잡한 자연 지형이 포함된다. 드론이 복잡한 환경에서 안정적으로 비행하기 위해서는 주변 장애물과 지면 상태 인지 및 경로 계획 기술이 필수적이다. 기존 연구[3-7]에서는 고가의 3D LiDAR나 정밀 SLAM 기술을 적용한 시스템이 높은 정확도를 제공하여 연구·개발이 활발히 이루어졌다. 하지만, 3D LiDAR와 정밀 SLAM 기반 시스템은 센서의 비용과 무게 때문에 소형 드론에 탑재하기 어렵고, 유지·보수 역시 쉽지 않다는 한계가 있다. 또한, 평지 환경 위주로 알고리즘을 설계하여 나무가 무성한 숲이나 지형 기복이 심한 곳에서 충분한 성능을 보장하기 어렵다. 본 연구에서는 스테레오 카메라와 거리센서만을 활용한 저비용자율 회피 드론시스템을 제안한다. 스테레오 카메라는 많은 영상 정보와 깊이 정보를 제공하여 주변 수목, 장애물을 효과적으로 인식할 수 있게 해준다. 그리고, 지형 추적에는 상대적으로 간단하고 가벼운 거리센서를 사용하여, 고가의 3D LiDAR를 대체할 수 있는 현실적인 대안을 검증하고자 한다. 이 방식은 센서 구성이 간단해 시스템 비용과 구현 복잡도를 낮추는 동시에, 나무가 많은 지역, 경사진 환경에서도 안정적인 비행을 유지할 수 있도록 설계되었다. 본 연구의 주요 기여점은 다음과 같다. · 스테레오 카메라와 거리센서만으로도, 기존 3D LiDAR 기반 시스템에 준하는 수준의 장애물 인식 및 지형 추적이 가능함을 입증한다. · 기존 기법들이 주로 평지 환경에서 평가된 것과 달리, 본 논문에서는 수목 환경과 경사지 등 실제 복합 지형에서 제안하는 알고리즘의 정확도와 안정성을 검증한다. · 제안하는 시스템은 하드웨어 구성과 소프트웨어 연동이 간단하여, PX4-ROS2 기반 자율 비행 시스템에 쉽게 적용할 수 있는 확장성을 갖춘다. 본 논문의 구성은 다음과 같다. 2장에서는 기존 연구를 조사하여 고가의 3D LiDAR를 사용하는 방법과 평지 환경을 전제로 한 경로 계획 알고리즘의 한계를 살펴본다. 3장에서는 장애물 인식 알고리즘의 전체 구조와 핵심 모듈인 지면 분할, 지형 추적을 소개한다. 4장에서는 구현된 자율 회피 드론 시스템을 제시하고, 5장에서는 시뮬레이션 및 실제 환경 실험을 통해 제안 기법의 성능을 검증한다. 마지막으로 6장에서는 연구 결과를 요약하고 향후 발전 방향을 논의한다. Ⅱ. 관련 연구정확한 장애물 인식과 지면 추정은 복잡 지형에서 자율 비행을 수행하는 무인항공기의 핵심 과제이다. 과거에는 3D LiDAR를 활용하여 SLAM이나 실시간 장애물 탐지를 수행하는 연구[4-6]가 주로 수행되었으나, 센서의 무게와 비용 한계로 소형 드론에 적합하지 않다. 최근에는 스테레오 카메라를 이용한 연구들이 비교적 저비용으로 3차원 정보를 추출할 수 있다는 장점 때문에 주목받고 있다[3,7]. 스테레오 카메라 기반 접근법은 특징점이 풍부한 환경에서 높은 정확도를 제공하지만, 조도 변화나 특징점이 부족한 영역에서는 추정 오차가 발생하는 한계가 있다. 특히, 기존 스테레오 카메라 기반 연구들은 대부분 평지나 단순 수목 환경을 대상으로 이루어졌으며, 경사지와 같은 복잡 지형에서 충분한 검증이 이루어지지 않았다. EGO-Planner[4]는 최근 주목받는 로컬 플래너 중 하나로, ESDF(Euclidean Signed Distance Field) 없이 경사 기반 최적화 방식을 이용하여 효율적인 경로 생성이 가능하다. 이 알고리즘은 고속 비행과 장애물 회피에 최적화된 구조를 가지고 있으며, 평지와 단순 환경에서 높은 성능을 보인다. 그러나, EGO-Planner는 복잡한 지형, 특히 경사지 환경에서는 성능이 제한적이라는 한계가 있다. 수목이 밀집된 지역이나 경사면과 같은 복잡한 자연 지형에서 실시간 회피 성능을 정량적으로 검증한 연구는 아직 충분히 이루어지지 않았다. 이에 따라 본 연구에서는 다양한 선행연구에서 기준선으로 활용되고, 경량 자율 비행 플래너 중 SOTA (State-of-the-Art)로 평가되는 EGO-Planner를 비교 대상으로 선정하였다. 본 연구는 기존의 평지 위주의 스테레오 카메라 기반 접근법에서 한 걸음 더 나아가, 복잡한 경사지 환경에서도 안정적으로 장애물을 인식하고 지면을 추정하는 방법을 제안한다. 이를 위해 스테레오 카메라와 거리센서를 융합하여, 고가의 3D LiDAR 없이도 복잡 지형에서 자율 비행을 가능하게 하였다. 스테레오 카메라는 깊이 기반의 3차원 정보를 제공하며, 거리센서는 실시간으로 고도를 보정하여 정확한 지형 추정을 가능하게 하였다. 스테레오 카메라와 거리센서를 결합하여 3D LiDAR 수준의 장애물 인식 성능을 달성한 방식은 3장에서 자세하게 설명한다. 제안된 알고리즘의 유효성을 검증하기 위해 실제 비행 실험을 진행하여 복잡한 지형에서도 신뢰도 높은 성능을 입증하였다. 그 결과, 경량화된 센서 융합을 기반으로 한 새로운 자율비행 접근법의 가능성을 제시하였다. Ⅲ. 수목 환경에서의 장애물 인식 알고리즘수목 환경과 같은 복합 지형에서 드론이 장애물을 인식하고, 안전하게 비행경로를 계획하기 위한 전체 구조도는 그림 1과 같다. Mapping 모듈에서는 스테레오 카메라로 획득한 영상을 바탕으로 환경 정보를 추출하고, 장애물을 감지하여 로컬 맵을 생성한다. Planning 모듈은 생성된 맵을 기반으로 장애물을 회피하는 비행 궤적을 계산한다. 마지막으로 Control 모듈은 궤적을 기반으로 비행제어 컴퓨터인 Pixhawk에 위치·속도 명령을 전달함으로써 실제 드론을 동적으로 제어한다. 상세 동작 방식은 아래와 같다. 우선, 스테레오 카메라에서 획득한 영상을 기반으로 Point Cloud를 생성하고, 지면과 장애물을 분리하는 과정을 수행한다. 수목 지형에서는 나무와 풀, 지면이 복잡하게 뒤섞여 있어 고가의 3D LiDAR나 SLAM 방식만으로는 충분치 않은 경우가 많다. 본 논문에서는 RANSAC (Random Sample Consensus)[8]을 활용하여 지면을 추출하고, 나머지 영역을 장애물로 인식함으로써, 지형과 기타 구조물을 구분하였다. 또한, 드론이 장애물에 과도하게 접근하는 상황을 예방하기 위해, 실제 장애물 형태를 일정 비율로 부풀리는 Occupancy Inflate 단계를 거쳐 안전거리를 확보하였다. 이는 스테레오 카메라의 깊이 추정 정확도가 3D LiDAR보다 낮은 점[9]을 고려한 보완 전략으로, 자율 회피 중의 안정성을 높인다. 구분된 지면 및 장애물 정보는 점유 격자 지도(Occupancy Grid Map) 형태의 로컬맵으로 관리되며, 시야 범위 내의 장애물을 효율적으로 반영해 실시간 연산량을 줄이는 데 기여한다. 지상 관제 시스템 (GCS, Ground Control System)으로부터 최종 목표 지점 (Global Goal)을 전달받은 뒤에는 글로벌 경로가 먼저 설정되고, 드론은 비행 중 로컬 맵을 활용하여 2Hz로 지역 경로를 재생성하여 장애물을 회피한다. 이때 현재 위치 및 자세 정보는 제어 모듈 내 Localization 결과를 기반으로 하며, Local Trajectory Planner로 전달되어 경로 계산에 반영된다. 생성된 지역 경로는 Setpoint Generator로 전달된다. 지면 분할이 정확히 이뤄져 있어야 드론이 지형과 장애물 정보를 명확히 구분할 수 있다. 특히 지면 분할을 통해 경사 지형을 장애물로 인식하는 문제를 해결할 수 있어 경사진 산림 지역에서도 안전하게 경로를 수정할 수 있다. 만약 드론의 이동 경로 상에 장애물이 발견될 경우, 충분한 안전거리를 고려한 회피 궤적을 찾아 충돌을 방지한다. 더 나아가, 지형 추적 기능을 통해 드론이 경사도나 고도를 실시간으로 파악함으로써, 기복이 심한 지형 위를 안정적으로 통과하도록 지원한다. 경로 계획 단계에서 산출된 궤적은 Pixhawk[10] 기반 제어기에 전달되어, 드론이 시간에 따른 목표 위치를 반영하여 비행하도록 제어된다. Pixhawk 내장 위치·속도 제어 알고리즘은 전달받은 좌표와 yaw 각도 등의 정보를 실시간으로 반영한다. 그 결과 수목 환경을 비롯한 복잡 지형에서도 장애물 인식과 안전 비행을 결합한 통합적 자율 비행 시스템으로서의 가치를 갖추게 된다. 3.1 지형 추적평지 환경에서는 드론의 최종 목적지 고도를 명시적으로 고려하지 않아도 안정적인 비행 경로를 계획할 수 있다. 그러나 그림 2와 같이 기복이 심한경사지 지형에서는 목표 지점의 실제 고도를 사전에 정확히 파악하기 어려우며, 기존 GPS 정보를 통해 얻는 해수면 기준 고도만으로는 드론과 지면 간의 상대 고도를 적절히 추정하기 어렵다. 본 연구에서는 기존 방식의 고도 추정 한계를 극복하기 위해, 지면으로부터의 높이를 유지하는 지상 고도기반 추정 기법을 적용함으로써, 경사지 환경에서도 드론이 일정 고도를 유지하며 안전하게 비행할 수 있는 알고리즘을 제안한다. 평지 환경에서는 드론의 최종 목적지 고도를 명시적으로 고려하지 않아도 안정적인 비행 경로를 계획할 수 있다. 그러나 그림 2와 같이 기복이 심한경사지 지형에서는 목표 지점의 실제 고도를 사전에 정확히 파악하기 어려우며, 기존 GPS 정보를 통해 얻는 해수면 기준 고도만으로는 드론과 지면 간의 상대 고도를 적절히 추정하기 어렵다. 본 연구에서는 기존 방식의 고도 추정 한계를 극복하기 위해, 지면으로부터의 높이를 유지하는 지상 고도기반 추정 기법을 적용함으로써, 경사지 환경에서도 드론이 일정 고도를 유지하며 안전하게 비행할 수 있는 알고리즘을 제안한다. 상대 고도 추정 기법을 위해 Pixhawk에서 제공되는 확장 칼만 필터(EKF2)를 활용하였다. 고도 융합 모델을 활용하여, 드론의 고도 상태를 해수면 기준이 아닌 지면 기준으로 추정하도록 구성하였다.
(1)[TeX:] $$x_k=\left[\begin{array}{c} z_k \\ v_{z_k} \end{array}\right]=\left[\begin{array}{cc} 1 & \Delta t \\ 0 & 1 \end{array}\right]\left[\begin{array}{c} z_{k-1} \\ v_{k-1} \end{array}\right]+\left[\begin{array}{c} \frac{1}{2} \Delta t^2 \\ \Delta t \end{array}\right] a_k+w_k$$여기서, 드론의 상태는 EKF의 상태 벡터로 표현되며, 상대 고도 [TeX:] $$z_k$$와 수직 속도 [TeX:] $$v_k$$로 구성된다. EKF의 예측 단계에서는 IMU데이터 [TeX:] $$a_k$$를 기반으로 시간에 따라 드론의 고도를 예측하며 식 (1)을 통해 드론의 상대 고도와 수직 속도가 이전 상태의 IMU 데이터를 기반으로 예측된다. 상태 예측의 불확실성을 나타내는 공분산은 식 (2)와 같이 계산된다.
여기서, [TeX:] $$P_k$$는 예측된 상태 공분산 행렬이며 A는 식 (1)에서 사용된 [TeX:] $$\left[\begin{array}{cc} 1 & \Delta t \\ 0 & 1 \end{array}\right]$$이다. 식 (1)과 식 (2)를 통해 드론의 상태와 상태의 불확실성을 예측한 이후 EKF의 갱신 단계에서는 센서 데이터를 활용하여 상태를 보정 하게 된다. 본 논문에서는 기존 GPS 기반의 절대 고도 추정 방식 대신 거리센서를 이용한 상대 고도 추정 방식을 적용하였으며, 이는 측정 모델 식 (3)과 같이 구현되었다.
여기서, [TeX:] $$d_{\text {ranger}}$$는 거리센서로부터 측정된 지면과의 거리이다. 거리 센서로부터 얻은 데이터를 활용하여 예측된 상태와 측정값 간의 차이를 계산하며 식 (4)를 통해 상태를 갱신한다.
칼만 이득 [TeX:] $$K_k$$는 측정값과 예측값 간의 신뢰도를 조합하여 상태를 갱신하는 가중치로, 식 (5)와 같이 계산된다.
여기서, H는 측정 모델의 자코비안 행렬이며 R은 거리 센서의 측정 잡음으로 0.4로 설정하였다. 위 방식을 통해 추정된 지상 고도는 실제 지형의 기복이 큰 환경에서도 드론이 목표 고도를 안정적으로 유지할 수 있도록 돕는다. 예를 들어, 목표 지점의 정확한 해발 고도를 알 수 없더라도, 드론은 지면으로부터 일정거리 이상을 유지하도록 제어할 수 있으므로, 나무가 울창한 숲이나 경사진 산악 지형에서도 충돌 위험을 크게 낮출 수 있다. 그 결과, 기존 GPS 위주의 고도 추정 방식에 비해, 경사지 환경에서의 안전성 및 비행 효율성을 높이는 데 중요한 역할을 한다. 3.2 지면 분할수목 환경에서 드론이 안정적으로 비행하려면, 지면과 장애물을 명확히 구분해 올바른 회피 궤적을 생성할 수 있어야 한다. 그러나 경사지나 복잡한 구조물이 포함된 실제 환경에서는 지면조차 장애물로 인식되어 불필요한 회피가 발생할 수 있다. 이를 해결하기 위해 본 연구는 RANSAC[8] 기반의 지면 분할 알고리즘을 적용하였다. 본 방법은 포인트 클라우드에서 무작위로 선택한 점들을 이용해 평면을 추정하고, 해당 평면으로부터의 거리가 일정 임계값 이하인 포인트를 지면(inlier)으로, 나머지를 장애물(outlier)로 분류한다. 반복 평가를 통해 가장 많은 inlier를 포함하는 평면이 최종 지면으로 선택되며, 이는 노이즈나 복잡한 구조에도 강건한 지면 추정을 가능하게 한다. 본 연구에서는 수목 환경에서 지면과 장애물을 구분하기 위해, 3차원 PointCloud 상에서 평면 모델을 추정하는 RANSAC 기반의 알고리즘을 적용하였다. 입력 데이터는 식 (6)과 같이 3차원 점들의 집합 P로 정의된다.
무작위로 선택된 3개의 점을 이용해 하나의 평면 모델 π를 추정하며, 이는 식 (7)과 같이 평면 방정식으로 표현된다.
이후 전체 포인트에 대해 해당 평면으로 부터의 수직거리 [TeX:] $$d_i$$를 식 (8)과 같이 계산하고, 사전에 정의된 임계값 τ 이하인 포인트는 Inlier로 간주한다. 이때 τ는 실제 실험을 통해 0.4로 설정하였다.
이러한 과정을 여러 번 반복되며, 각 반복 마다 얻어딘 평면 모델에 대해 Inlier 수를 비교한 후, 가장 많은 Inlier를 포함하는 최적의 평면 모델 [TeX:] $$\pi^*$$를 식 (9)와 같이 선택한다.
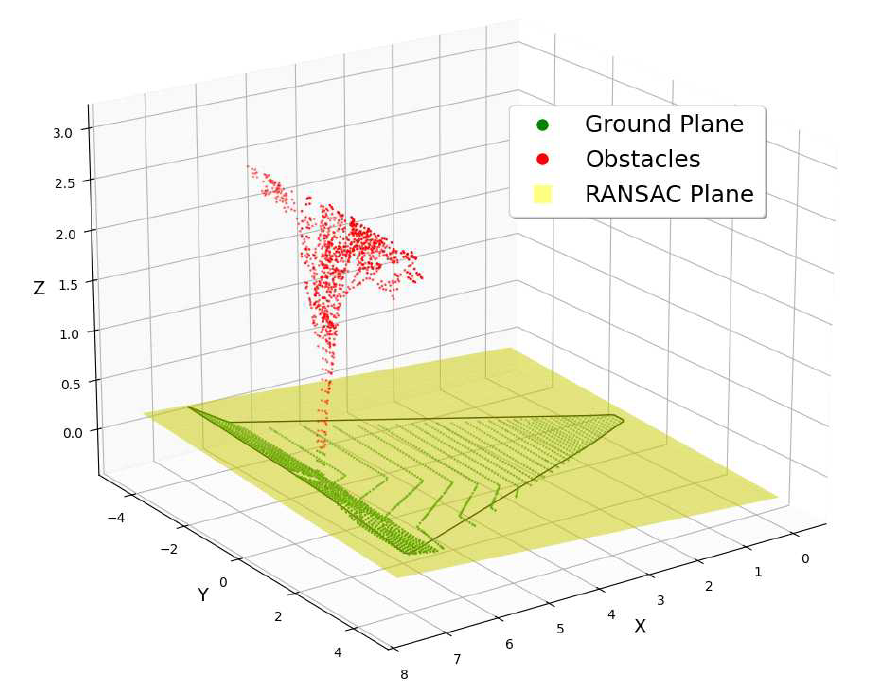
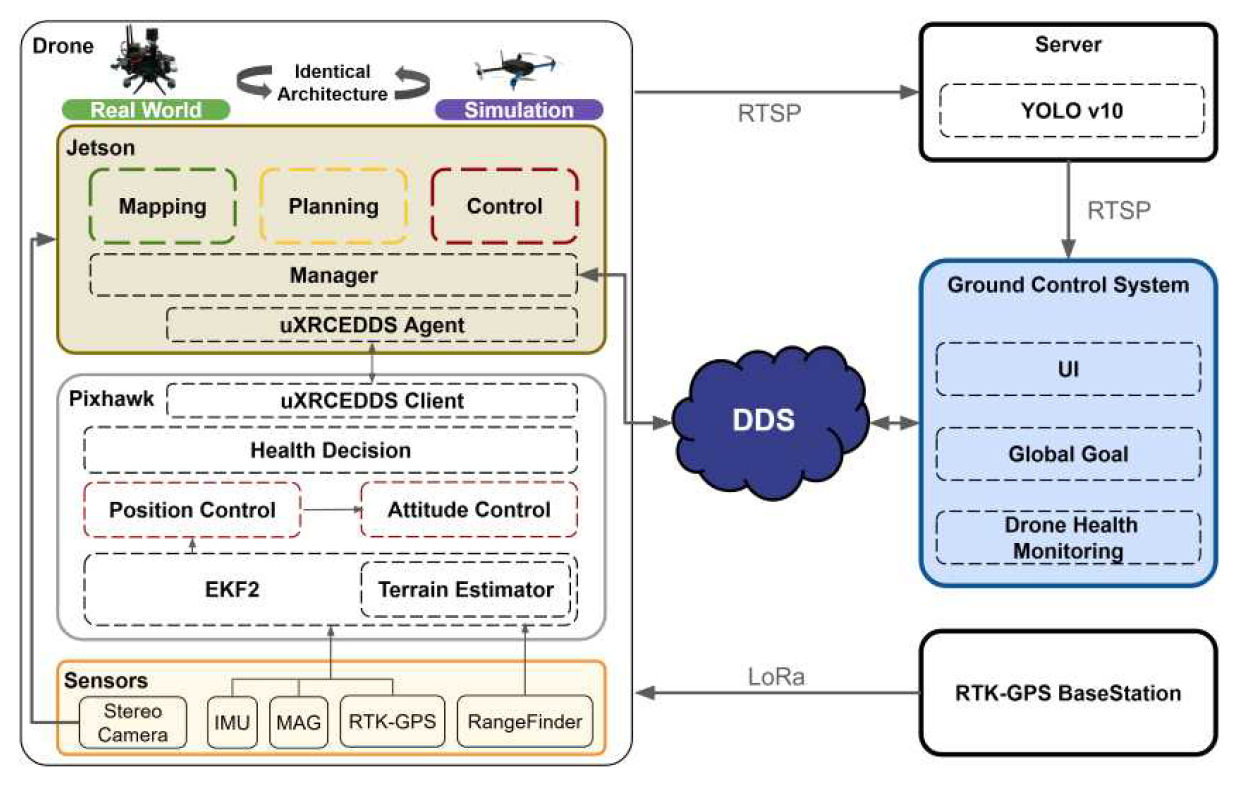
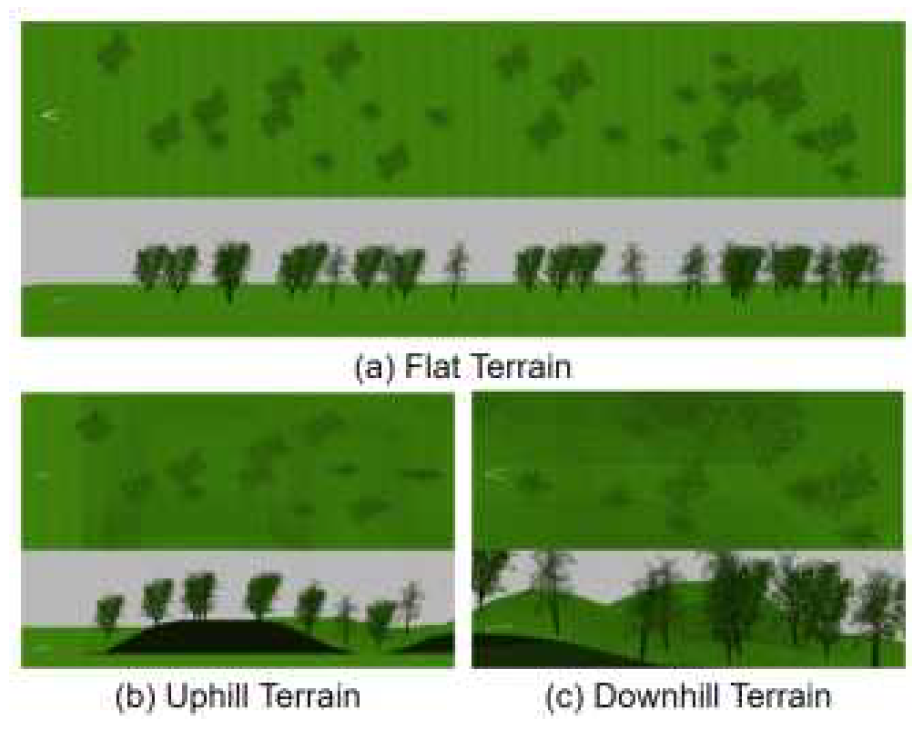
최종적으로 선택된 평면에 속한 점은 지면으로, 그 외의 점은 장애물로 분류되어 로컬맵 생성으로 활용된다. 그림 3은 RANSAC 기반 지면 분할 결과를 시각화한 예시로, 평면으로 인식된 지면은 녹색 점으로 표시되고, 나무와 같은 실제 장애물은 빨간 점으로 구분된다. 또한, 노란색으로 표시된 면은 RANSAC을 통해 추정된 평면이며, 드론은 이를 참조하여 지면과 일정 고도를 유지하거나 장애물이 감지된 방향으로는 회피 궤적을 계획하게 된다. 이 과정을 통해 드론이 경사지 지형에서도 효율적이고 안정적인 비행을 수행할 수 있었다. Ⅳ. 자율 회피 드론 시스템수목 정찰 드론 시스템은 그림 4와 같이 PX4-ROS2 기반으로 설계되었다. 실제 드론과 시뮬레이션 환경 간에 동일한 소프트웨어 아키텍처를 적용함으로써, 시뮬레이션 단계에서 검증된 알고리즘을 실제 비행 임무에 그대로 활용할 수 있었다. 그 결과, 시뮬레이션과 실제 운용 간 재현성을 높이고, 예상치 못한 시스템 불안정을 최소화하였다. 지상관제 시스템과 드론은 Wi-Fi 및 LTE를 통해 연결되며, ROS2 기반 데이터 분산 서비스(Data Distribution Service, DDS)를 활용해 상태 정보와 명령 데이터를 실시간으로 주고받는다. GCS는 드론의 상태를 모니터링하고, 위성지도 상에서 최종 목적지를 지정하여 명령을 전달한다. 실시간 통신 체계는 운용자가 드론의 상태를 효율적으로 관리하고 필요한 경우 경로를 즉시 조정할 수 있도록 지원한다. 드론 내부의 임무 컴퓨터는 Jetson 모듈로 구성되어 있으며, ROS2 기반 소프트웨어를 통해 고수준의 자율 비행 기능을 지원한다. 이 과정에서 ROS2 노드는 데이터를 처리하고, 드론의 위치 및 속도를 제어하는 데 필요한 명령을 PX4에 전달한다. 한편, PX4와 ROS2 간의 원활한 데이터 교환을 위해 Micro XRCE-DDS[11]를 활용하였다. 이 프로토콜은 ROS2 기반 노드와 PX4 펌웨어 간의 실시간 데이터 전송을 가능하게 하며, 저전력 임베디드 시스템에서도 효율적으로 동작할 수 있도록 설계되었다. PX4에서 생성된 실시간 위치 및 자세 정보는 ROS2로 전달되며, ROS2에서 계산된 경로 계획 데이터는 PX4로 전달되어 드론의 실제 비행을 제어한다. Flight Control Computer(FCC)는 PX4 펌웨어와 통합되어 거리센서, IMU, RTK-GPS 등 다양한 센서를 융합하여 드론의 고도, 위치, 자세를 정확히 추정한다. PX4는 250Hz로 위치 및 자세 제어를 수행하며, ROS2로부터 전달받은 궤적 정보를 기반으로 드론의 물리적 동작을 제어한다. 이 시스템은 경사 지형이나 복잡한 환경에서도 드론이 안정적으로 자율 비행을 수행할 수 있도록 설계되었다. PX4-ROS2 기반 아키텍처는 하드웨어 수준의 안정적인 저수준 비행 제어와 고수준 자율 알고리즘의 유기적 결합을 가능하게 한다. 또한, 동일한 소프트웨어 구조를 시뮬레이션과 실제 드론 운용에 적용함으로써 개발 효율성과 시스템 안정성을 동시에 확보하였다. 이를 통해, 복잡한 자연환경에서도 신뢰도 높은 자율 비행이 가능함을 실험적으로 검증할 수 있었다. Ⅴ. 실 험제안한 알고리즘의 검증을 위해 다양한 지면 상태와 수목 환경을 시뮬레이션 실험 환경으로 제시한다. 실험 환경 내에서 제안한 알고리즘이 기존 알고리즘(EGO-Planner)과 비교하여 목표 지점까지 도달 여부와 함께 궤적의 정확도 및 안정성을 분석한다. 또한, 실제 환경에서 지면 분할 및 지형 추적의 효과를 평가함으로써 다양한 실제 환경에서 임무 수행이 가능함을 검증한다. 특히, 드론봇 챌린지 대회에서 제시한 환경에서 동작시킴으로써 실전 투입 가능 여부를 확인한다. 5.1 시뮬레이션 실험본 연구에서는 제안한 지면 분할 및 지형 추적 알고리즘의 성능을 검증하기 위해 시뮬레이션 실험을 수행하였다. 시뮬레이션 환경은 그림 5와 같이 (a) 나무가 배치된 평지, (b) 나무가 있는 오르막 경사지, (c) 나무가 있는 내리막 경사지로 구성되었다. 실험은 Gazebo[12]에서 진행되었으며, 환경은 Ubuntu 22.04 LTS에서 구성되었다. 하드웨어 사양은 Intel i7-13700K CPU, NVIDIA RTX 4060 Ti GPU, 32GB RAM으로 설정하였다. 하지만, Gazebo의 기본 나무 모델은 물리 엔진에서 나뭇잎과 나뭇가지 표현이 지나치게 단순화되어 있어, 드론의 센서 입력 데이터를 제대로 반영하지 못하는 문제가 있었다. 이를 보완하기 위해 기존 Gazebo에서 제공하는 단순 나무 모델 대신 정교한 나무 모델을 직접 제작하여 활용하였다. 제작된 나무 모델은 나뭇잎과 가지까지 세밀하게 묘사하여 실제 환경과 유사한 장애물 환경을 구성하였으며, 이를 통해 제안된 시스템의 성능을 더욱 정밀하게 검증할 수 있었다. 각 시나리오에서 드론은 시작점에서 목표 지점까지 자율 비행을 수행하였으며, 실시간 위치와 자세는 PX4의 EKF2 모듈을 통해 추정된 데이터를 기반으로 기록하였다. 비행 궤적은 후처리를통해 시각화 및 분석하였으며, 비행 성공률, 평균 속도, 고도 변화량, 횡 이동 표준편차 총 4가지 평가 지표를 활용해 제안 기법과 EGO-Planner의 성능을 비교 평가하였다. 그림 6은 제안된 알고리즘과 EGO-Planner가 다양한 시뮬레이션 환경에서 생성한 이동 궤적을 비교한 결과를 나타낸다. 실험은 그림 5의 세가지 환경에서 수행했으며, 각 환경에서의 경로 특성과 장애물 회피 동작을 분석하였다. 그림(Fig.) 6. 다양한 시나리오에서 제안된 알고리즘과 EGO-Planner의 이동 궤적 비교 (Trajectory Comparison Between the Proposed Algorithm and EGO-Planner in Different Scenarios) 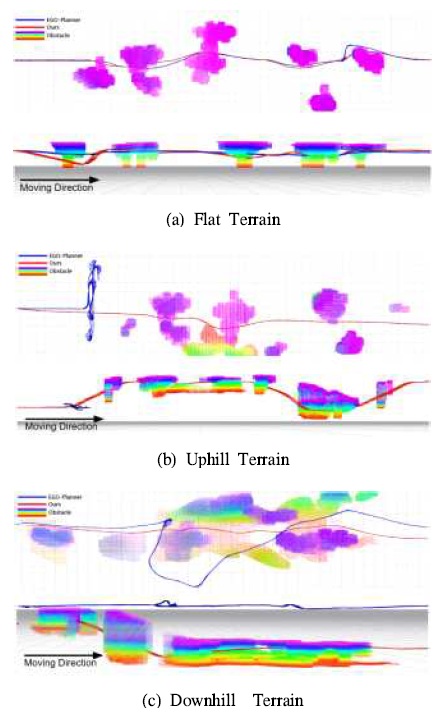 평지 환경 (a)에서는 EGO-Planner와 제안된 알고리즘 모두 원활한 경로를 형성하며 장애물을 효율적으로 회피하는 모습을 보였다. 지형이 일정한 환경에서는 장애물 회피 동작이 최소화되므로 두 방법 모두 안정적인 경로를 유지하며 비교적 유사한 성능을 나타내었다. 이는 단순한 환경에서는 기존 방법과 제안된 알고리즘이 동일한 수준의 경로 계획 성능을 제공할 수 있음을 보여준다. 오르막 환경 (b)에서는 EGO-Planner가 지면을 장애물로 잘못 인식하여 경사면을 회피하려는 경향이 나타났다. 이로 인해 불필요한 횡이동이 반복되며 비효율적인 경로가 생성되었고, 경사면을 따라 원활하게 상승하지 못하고 좌우로 불규칙한 이동이 발생했다. 이에 반해, 제안된 알고리즘은 지면 분할과 지면 추적 기법을 적용하여 이러한 오류를 방지하고 부드러운 상승 경로를 형성하였다. 내리막 환경 (c)에서도 두 방법 간의 경로 차이가 뚜렷하게 드러났다. EGO-Planner는 도착점의 정확한 고도를 알지 못해 일정한 고도를 유지하려는 경향을 보였으며, 그 결과 나뭇잎이 많은 지역으로 진입하면서 장애물 회피 과정에서 경로가 크게 돌아가는 비효율성이 나타났다. 이에 비해, 제안된 알고리즘은 지형의 변화를 지속적으로 반영하며 고도를 동적으로 조정하였고, 내리막 구간에서는 자연스럽게 고도를 낮추며 비행하였다. 이로 인해 드론은 나뭇잎이 많은 상층부 대신 나무 기둥이 있는 높이에서 이동하게 되었으며, 불필요한 회피 없이 보다 최적화된 경로를 유지하였다. 결과적으로, 평지 환경에서는 두 방법 모두 안정적인 이동 경로를 형성하였으나, 경사지 환경에서는 EGO-Planner가 지형을 장애물로 잘못 인식하여 비효율적인 회피 동작을 수행하는 경향이 나타났다. 반면, 제안된 알고리즘은 지면과 장애물을 구분하여 정확하게 인식하여 경로 계획을 수행함으로써 효율적인 이동궤적을 형성하였다. 그 결과, 지형 정보를 적극적으로 활용하는 경로 계획 기법이 복잡한 환경에서도 안정적인 주행 성능을 제공할 수 있음을 보여준다. 그림 5에서 제시한 다양한 시뮬레이션 환경에서 제안한 알고리즘의 수치적 성능 비교는 표 1과 같다. 성능 비교는 성공률(Success Rate), 평균 속도(Average Speed), 누적 고도 변화량([TeX:] $$\sum|\Delta Z|$$), 횡이동 표준편차([TeX:] $$\sigma_y$$)를 기준으로 수행되었다. 횡이동 표준편차는 드론이 이동하는 동안 좌우 방향으로 얼마나 이동했는지 나타내는 지표로 값이 작을수록 불필요한 횡이동이 적었음을 의미하며, 값이 클수록 불안정한 경로를 이동했음을 의미한다. 표(Table) 1. 다양한 시나리오에서 EGO-Planner와 제안된 방법의 성능 비교 (Comparison of the Performance of EGO-Planner and the Proposed Method in Various Scenarios)
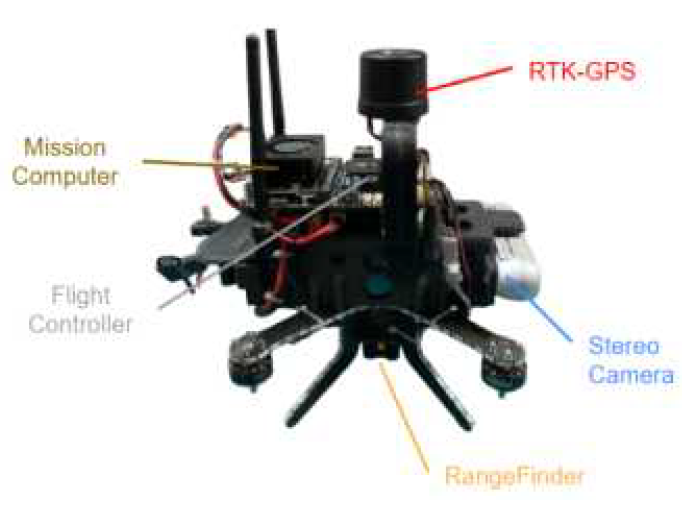
평지 환경 (a)에서는 두 방법 모두 100%의 성공률을 기록하였으며, 평균 속도 또한 큰 차이가 없었다. 이는 평탄한 지형에서는 두 방법이 유사한 경로를 생성하며 안정적인 이동이 가능함을 의미한다. 또한, 누적 고도 변화량과 횡이동 표준편차가 매우 낮게 유지되었으며, 이는 두 방법 모두 불필요한 이동 없이 효율적인 경로를 형성했음을 보여준다. 한편, 오르막 환경(b)에서 EGO-Planner는 지면을 장애물로 인식하여 경사면을 회피할려는 움직을 보여주면서 경사면을 넘어서지 못해 통과하지 못했다. 또한, 횡이동 표준편차가 2.07로 높게 나타나, 좌우로 불규칙한 이동이 발생했음을 알 수 있었다. 반면, 제안된 알고리즘은 지형 추적을 통해 지면을 고려한 경로를 형성하였으며, 100%의 성공률을 기록하였다. 또한, 경사면을 따라 이동하면서 고도를 적극적으로 조정하여 상승하는 특징을 보였으며, 누적 고도 변화량이 10.04m로 크게 증가하였다. 내리막 환경(c)에서도 유사한 경향이 확인되었다. EGO-Planner는 일정한 고도를 유지하면서 이동하려 했으며, 나뭇잎과 같은 장애물을 회피하는 과정에서 경로가 크게 휘어졌다. 횡이동 표준편차가 2.85로 증가하였으며, 전체적인 경로 효율성이 저하되었다. 반면, 제안된 알고리즘은 지면을 추적하면서 고도를 지속적으로 조정하여 경사면을 따라 이동하는 전략을 사용하였다. 또한, 불필요한 횡이동이 줄어들었으며 최적화된 경로를 형성하였고, 누적 고도 변화량이 4.85m로 나타났다. 제안된 알고리즘은 경사지 환경에서 지면을 적극적으로 활용하는 경로 계획을 수행함으로써 보다 안정적이고 효율적인 이동을 가능하게 하였다. 반면, EGO-Planner는 경사면을 장애물로 잘못 인식하거나 일정한 고도를 유지하려는 경향으로 인해 경로 효율성이 저하되는 모습을 보였다. 이는 지형을 반영한 경로계획 기법이 복잡한 환경에서도 보다 효과적인 성능을 제공할 수 있음을 보여준다. 5.2 실제 환경에서 실험 결과실제 환경에서의 비행 실험은 경사지와 수목이 밀집한 복합 지형에서 수행되었으며, 이를 통해 제안된 시스템의 실용성과 성능을 평가하였다. 그림 7과 같이 실험에 사용된 드론은 Pixhawk6를 비행 제어 컴퓨터(FCC)로, Jetson Orin Nano 8GB를 미션 컴퓨터로 선택하였으며, Holybro Pixhawk Jetson Baseboard를 사용하여 하드웨어 구성을 소형화하였다. 장애물 탐지 및 정찰를 위해 Intel Realsense D455 스테레오 카메라를 활용하였으며, 기체의 전체 크기는 290 x 290 x 280mm로, 배터리를 포함한 총 무게는 약 2kg이다. 실험에서의 평균 비행 시간은 약 17분으로 측정되었다. 기존3D LiDAR 기반 시스템 대비 다음과 같은 장점을 제공한다. 첫째, 3D LiDAR는 크기가 크고 무게가 무거워 소형 드론에 탑재하기 어렵고, 고비용으로 인해 실용성이 제한되었다. 반면, 스테레오 카메라와 거리센서를 활용한 본 시스템은 저비용과 경량화를 동시에 달성하여 드론의 크기를 크게 줄였다. 둘째, 기체 크기와 무게를 줄임으로써 비행 효율성과 민첩성이 향상되어 복잡한 수목 환경에서도 안정적인 비행이 가능했다. 특히, 본 시스템은 소형 드론에 최적화된 구성으로, 수목 정찰과 같은 제한된 공간에서의 자율 비행 임무에 효과적이다. 셋째, 스테레오 카메라의 깊이 정보와 거리센서를 결합함으로써, 3D LiDAR 없이도 기존 3D LiDAR 기반 시스템에 준하는 장애물 인식과 지형 추적 성능을 제공한다. 그림 8은 실제 수목 환경에서 드론의 지면 분할 알고리즘 성능을 보여주는 예시이다. 왼쪽 이미지는 드론이 비행 중촬영한 FPV 영상이며, 오른쪽 이미지는 동일한 시각에 생성된 Point Cloud 데이터를 시각화한 결과를 나타낸다. 오른쪽 시각화에서 드론은 장애물을 정확히 분할하여 지면과 구분하였으며, 지면 분할 결과는 RViz를 활용하여 나타내었다. 그림(Fig.) 8. 실제 환경에서의 지면 분할 및 장애물 인식 결과: (좌) 실제 환경에서 촬영된 FPV 이미지, (우) 지면과 장애물 분리된 이미지 (Ground Segmentation and Obstacle Detection Results in Real Environment: (Left) Ground and Obstacle Segmented Image) 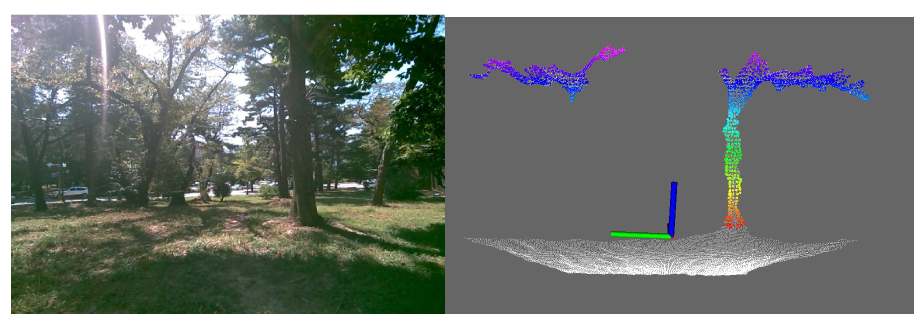 제안된 알고리즘은 실제 환경에서도 지면을 안정적으로 분리하고 나무와 같은 장애물을 정확히 인식하여 안전한 비행경로를 생성할 수 있도록 한다. 그림 9는 대전 한밭수목원에서 수행된 “2024 제3회 국방부장관배 드론봇챌린지 대회”[13] 중 드론의 이동 경로와 실제 환경을 나타낸다. 왼쪽은 위성지도에 드론이 약 350m를 이동한 궤적을 표시한 이미지이며, 오른쪽은 드론이 비행한 실제 수목 환경을 촬영한 사진이다. 그림(Fig.) 9. 대전 한밭수목원: (좌) 드론의 비행 경로가 표시된 위성지도, (우) 드론이 비행한 실제 수목 환경 (Hanbat Arboretum, Daejeon: (Left) Satellite map showing the drone's flight path, (Right) Actual forest environment where the drone flew)  대회의 다른 팀들은 모두 3D LiDAR 기반 시스템을 사용한 반면, 본 연구팀은 스테레오 카메라와 거리센서를 활용한 간단한 하드웨어 구성으로 참가하였다. 본 시스템은 수목 정찰 부문에서 우수한 성과를 거두며, 고가의 3D LiDAR 없이도 높은 수준의 장애물 탐지 및 지형 추적 성능을 제공할 수 있음을 입증하였다. Ⅵ. 결 론본 연구에서는 스테레오 카메라와 거리센서 기반의 경량화된 드론 시스템을 통해 복잡한 경사지 및 수목 환경에서의 자율 비행 성능을 검증하였다. 제안된 지면 분할 및 지형 추적 알고리즘은 기존 3D LiDAR 기반 시스템에 준하는 수준의 장애물 인식 및 지형 추적 능력을 제공하면서도, 하드웨어 구성의 복잡도와 비용을 대폭 낮출 수 있었다. 이를 통해 경사 및 복합 지형에서도 드론이 안정적으로 비행하며 목표 지점을 향해 이동할 수 있음을 실험적으로 입증하였다. 또한, 본 시스템은 대전 한밭수목원에서 열린 “2024 제3회 국방부장관배 드론봇챌린지” 대회에서 뛰어난 성과를 거두며, 실제 환경에서도 실용성을 보였다. 향후 연구에서는 제안된 지면 분할 알고리즘을 확장하여 Semantic Segmentation 기법을 추가적으로 적용할 예정이다. 이를 통해 장애물을 단순히 회피하는 수준을 넘어, 장애물의 특성을 파악하고 동적 장애물(예: 사람, 나뭇잎)과 정적 장애물(예: 나무 기둥, 바위)을 구분할 계획이다. 장애물 유형에 따라 Inflation 크기를 다르게 설정하여, 움직일 가능성이 있는 장애물에 대해 보다 안정적이고 효율적인 회피 경로를 생성하는 데 기여할 것이다. 해당 기술을 적용한 시스템은 복잡한 환경에서의 드론 자율 비행의 안정성과 안전성을 한층 강화할 것으로 기대된다. BiographyBiographyBiographyBiographyBiographyBiographyReferences
|
StatisticsCite this articleIEEE StyleS. Song, C. Ji, M. Kim, G. Lim, T. Joe, S. Moon, "Development of a Stereo Camera-Based Autonomous Obstacle Avoidance Drone System," The Journal of Korean Institute of Communications and Information Sciences, vol. 50, no. 11, pp. 1760-1770, 2025. DOI: 10.7840/kics.2025.50.11.1760.
ACM Style Si-woon Song, Chang-hun Ji, Min-kyu Kim, Gyeong-hun Lim, Tae-hyeon Joe, and Sung-tae Moon. 2025. Development of a Stereo Camera-Based Autonomous Obstacle Avoidance Drone System. The Journal of Korean Institute of Communications and Information Sciences, 50, 11, (2025), 1760-1770. DOI: 10.7840/kics.2025.50.11.1760.
KICS Style Si-woon Song, Chang-hun Ji, Min-kyu Kim, Gyeong-hun Lim, Tae-hyeon Joe, Sung-tae Moon, "Development of a Stereo Camera-Based Autonomous Obstacle Avoidance Drone System," The Journal of Korean Institute of Communications and Information Sciences, vol. 50, no. 11, pp. 1760-1770, 11. 2025. (https://doi.org/10.7840/kics.2025.50.11.1760)
|