IndexFiguresTables |
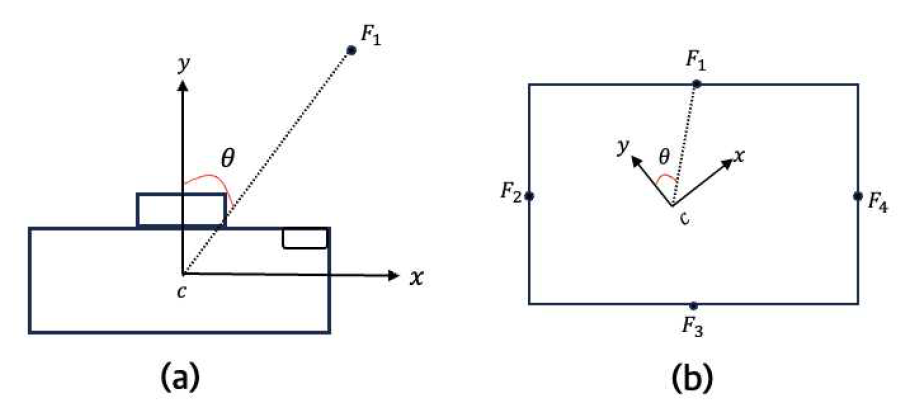
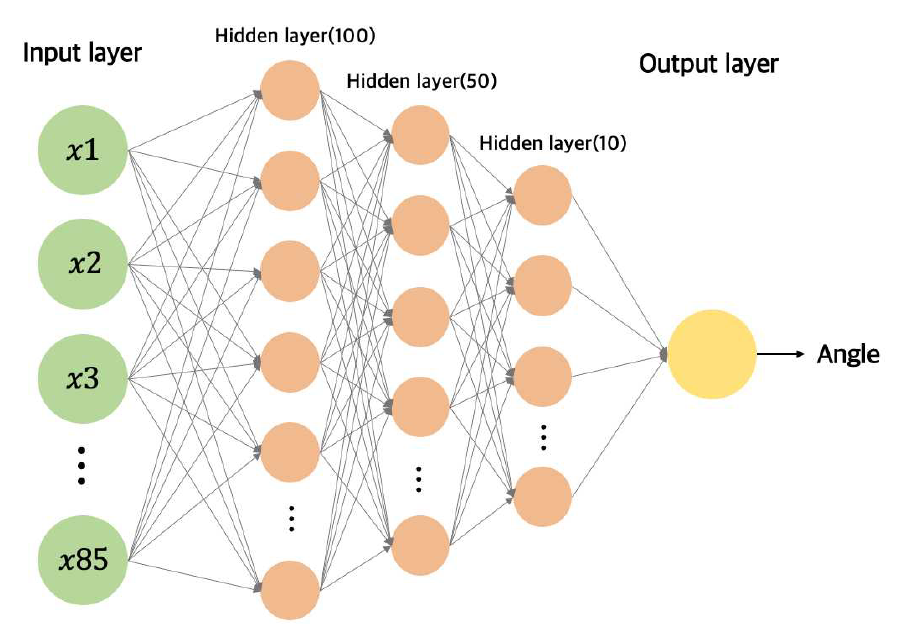
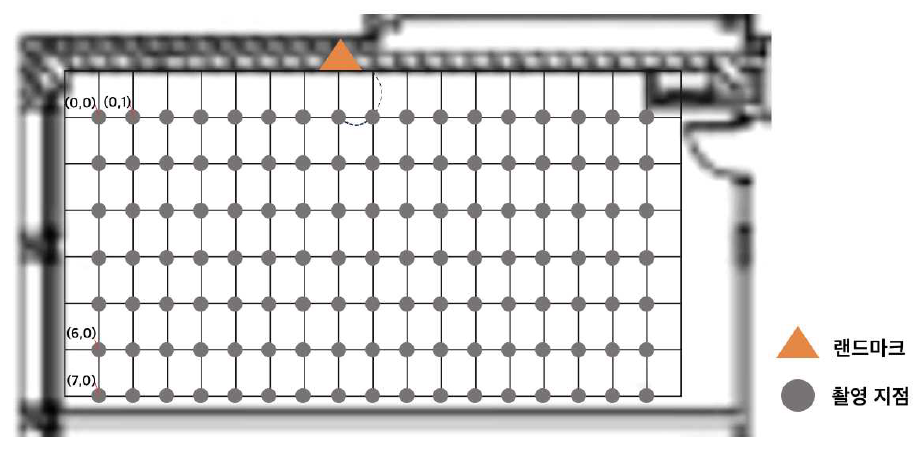
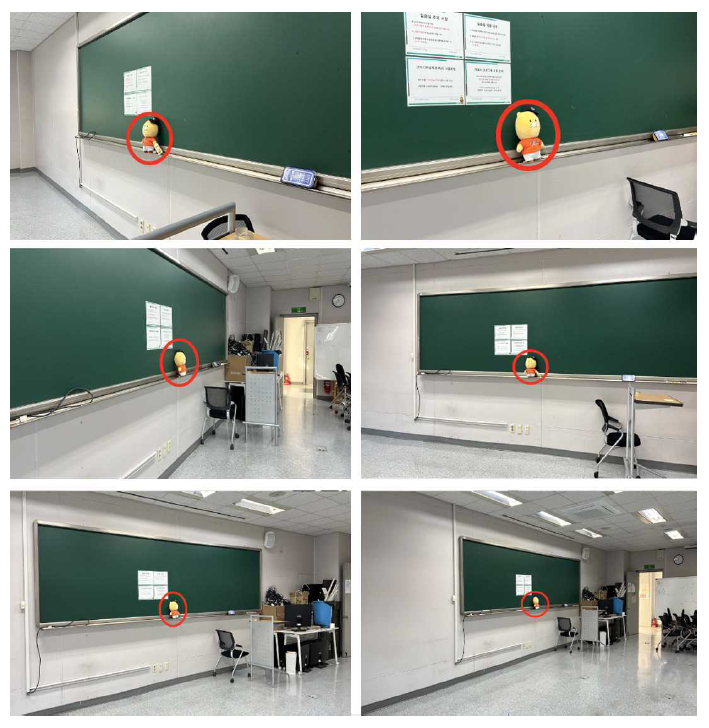
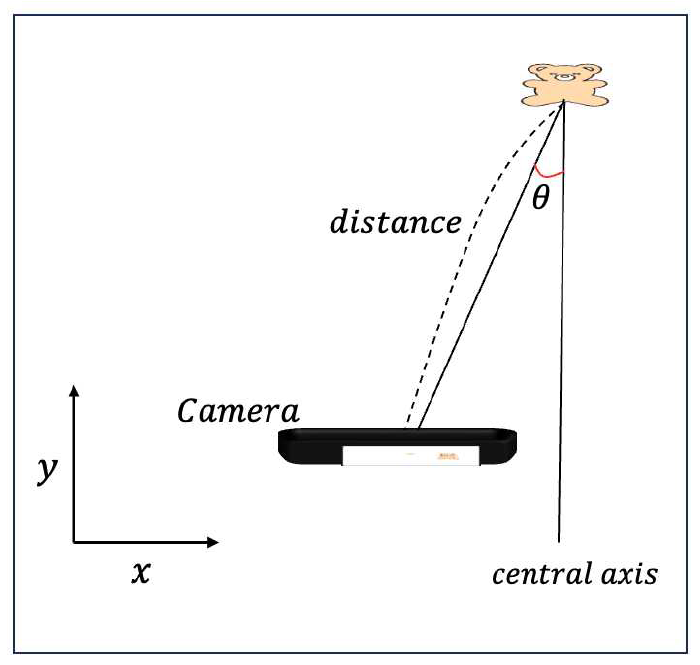
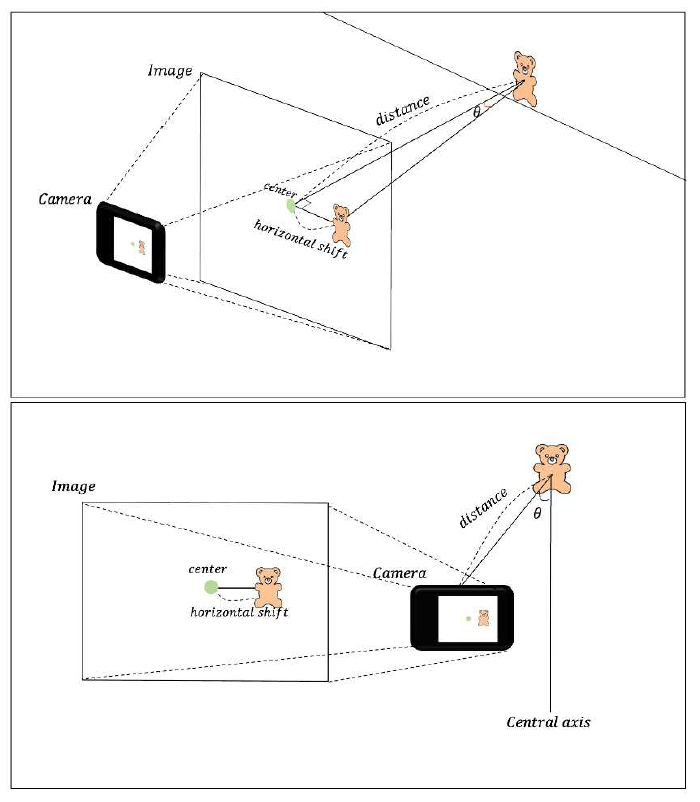
Youngchae Cho , Soyoung Jang and Jaeho LeeAn Angle Estimation Scheme for Single Camera-Based Indoor PositioningAbstract: This paper describes a new method for angle estimation using only a single camera, overcoming the limitations of previous indoor positioning methods that required sensors or infrastructure. By employing the principles of trigonometry. It demonstrates that angles can be estimated using just a landmark and a single camera. The study analyzes and compares methods of inferring angles using deep learning with those obtained through calculation, ultimately proving the efficiency of the algorithmic approach in angle estimation. This research describes a method for estimating the camera's position simply through calculations involving the camera and a landmark. Ⅰ. 서 론실내 측위는 GPS 수신이 불가능한 건물 내부에서 사용자나 물체의 위치를 파악하는 기술로, 여러 분야에서 사용되고 있다. 실내 측위 기술은 기존의 전통적인 방법들부터 최신 기술에 이르기까지 여러 방법들이 존재한다. 전통적인 방법으로는 삼각측량(Triangulation), 삼변측량(Trilateration), 핑거프린팅 등의 방법이 있다. 삼각측량법은 세 점의 위치 정보와 그 점들의 교차점을 기반으로 거리 혹은 각도 정보를 이용하여 객체의 위치를 추정한 후 실내 측위를 수행하는 방법이다[1]. 삼변측량법은 삼각측량법과 마찬가지로 삼각형 기하학을 사용하여 물체의 위치를 구한다. 두 개 이상의 기준점과, 각 기준점과의 거리를 이용해 목표물의 위치를 얻는다[2]. 핑거프린팅 기법은 대상의 위치를 결정하기 위해 여러 참조위치에서 무선 신호의 세기를 측정하여 라디오 지도(radio map)에 저장하는 방식이다[3]. 기하학적 접근 방법에 비해 상대적으로 간단하며 스마트 디바이스에도 쉽게 통합될 수 있다[4]. 핑거프린팅 기법은 주로 거리 기반 방법인 RSSI(Received Signal Strength Indicator) 정보를 사용한다. RSS는 수신기에서 수신되는 실제 신호 전력 강도이며 이 RSS값을 사용하여 측위를 수행한다. 신호를 송신하는 송신기와 수신하는 수신기의 거리가 가까울수록 RSS값이 커지고, 둘의 거리가 멀수록 RSS값은 작아진다. 이때 사용하는 통신기술은 대표적으로 Wi-Fi, BLE, Zigbee 등이 있다. 무선 센서 네트워크(WSN; Wireless Sensor Network) 방법을 이용한 실내 측위 방법도 존재한다. 센서를 통해 데이터를 수집하고 처리한 다음 이 데이터를 무선 링크를 통해 전송하여 센서 노드의 위치를 얻어서 위치 측위를 진행하는 방법이다.[5] 노드 위치를 추정하는 다양한 접근 방법으로는 AoA, ToA, TDoA등의 방법들이 있다. AoA(Angle of Arrival)는 두 개 이상의 송신기에서 신호가 수신된 각도를 이용해 수신기의 좌표를 추정하는 방법이다[6]. 다른 방법으로는 신호의 도달 시간을 측정하여 위치를 계산하는 ToA(Time of Arrival)과 신호의 도달 시간차를 이용하여 위치를 계산하는 TDoA(Time Difference of Arrival) 방식이 있다. 이 두 기술은 3개 이상의 수신기로부터 수신된 신호들을 기반으로 ToA는 원을, TDoA는 쌍곡선을 그린 후 그 교점을 통해 위치를 추정하는 방식이다[7]. 최근에는 인공지능 기반으로 실내 측위를 진행하는 방법에 대해서도 활발히 연구되고 있다. 대표적인 인공지능을 이용한 실내 측위 방법은SLAM(Simultaneous Localization and Mapping)이 있다. 이는 상대적 거리를 측정하는 센서를 이용해 실시간으로 지도 생성 및 위치 측정을 동시에 하는 기술이다. SLAM은 CNN(Convolution Neural Network)같은 이미지 처리 모델을 이용하는 Visual SLAM이 있고, 레이저를 방사하여 그 빛이 도달한 시간을 통해 지도를 생성하고 위치를 추정하는 LiDAR SLAM 기술이 있다[8]. 또한 앞서 서술했던 핑거프린팅 같은 방법들을 인공지능으로 추정하는 방법들도 있다. 하지만 위에 서술한 방법들은 모두 특정 디바이스나 센서 같은 인프라가 별도로 필요하므로 하드웨어 요소에 의존적이다. 이러한 의존성은 실제 적용에서의 범용성을 제한할 수 있다. 따라서 본 논문에서는 이런 센서나 인프라가 없는 환경에서 단지 스마트폰 카메라 하나만으로 방향각 인지를 수행하는 방법을 제안한다. 실내 측위를 수행하기 위해서는 거리와 각도 정보가 필요하다. 그 중에서도 단일 카메라를 이용해 각도를 예측하여 각도 정보를 획득하는 방법에 대해 자세히 서술하려 한다. 본 논문에서는 알고리즘을 통한 실내 측위 방법, 딥러닝을 통한 실내 측위 방법을 둘 다 제시한 후 다양한 측면에서 비교 분석을 시행한 결과를 제시하려고 한다. 딥러닝을 이용한 실내 측위 방법은 여러 방법이 존재하지만 본 논문처럼 카메라를 통해 각도를 얻는 방법과는 다르기 때문에 각도를 추정하는 딥러닝 모델을 직접 구현하고 본 제안 알고리즘 기반 방법과 분석을 수행한다. Ⅱ. 관련 연구거리를 인지하고 있는 상황에서 피사체와의 각도를 구하고 그 각도를 활용하여 실내 측위를 수행하는 방법에는 여러가지가 존재한다. 그 중 알고리즘을 통해 각도를 계산하는 선행 연구에 대해 서술한다. 알고리즘을 통해 카메라와 랜드마크와의 각도를 구하거나 이를 이용하는 방식은 오랜 시간동안 연구되어왔으며, 이를 다양한 기기에 접목시키거나 특정 센서를 사용하여 각도를 활용하는 연구들이 존재한다.[9-13] 로봇에 장착한 카메라를 통해 로봇의 다음 위치를 예측하기 위해 랜드마크와 카메라 간의 각도를 계산하기도 한다[9]. 본 연구는 랜드마크와 카메라 간의 거리와 수평 거리를 활용한다. 카메라가 앞을 향하는 수직축과 랜드마크 간의 각도를 역탄젠트 함수를 통해 연산한 후 이동 전 각도와 이동 후 각도를 모두 획득한 후 다음 위치를 예측한다. kalman필터를 추가적으로 사용하였으므로 더욱 안정적이고 정밀하지만, 이전 위치와 현재 위치가 촬영된 두개의 이미지가 반드시 필요하다는 한계가 존재한다. 카메라와 레이저 센서를 통합하여 랜드마크의 위치를 추정하기 위해 각도를 예측하는 연구도 진행되어왔다[10]. 일정한 각도로 나열된 레이저 센서가 랜드마크를 감지하면 이 위치를 통해 카메라가 이미지를 촬영한 후 각도를 계산한다. 각도는 카메라를 기준으로 중심축과 측정된 레이저 센서사이의 각도를 구하게된다. 이미지 하나만 필요하고 카메라의 왜곡을 레이저 센서가 보정해준다는 장점이 있으나, 여러 개의 레이저 센서가 필요하고 레이저 센서의 오차를 추가적으로 보정해줘야만 한다. 따로 인공적인 랜드마크를 사용하지 않고 건물의 지형지물을 랜드마크로 설정하여 카메라와의 각도를 예측하는 연구도 있다[11]. 건물 내부에 존재하는 벽의 수직선, 문과 바닥의 교점등을 랜드마크로 설정하여 로봇의 위치를 추정한다. 랜드마크에 대한 선의 방정식, 즉 거리를 구하기위해 각도를 계산한다. 이 각도는 이미지 내 랜드마크의 x축 크기와 초점거리를 이용해 계산한다. 이는 인공적으로 랜드마크를 배치할 필요가 없지만, 카메라는 반드시 한 방향만을 볼 수 있고, 초점거리 변수가 반드시 있어야 한다. 초점거리 같은 별도의 변수 없이 카메라와 랜드마크 사이의 각도를 구하는 방법도 있다[12]. 해당 연구는 그림 1(a)와 같이 위에서 카메라를 내려다본 방향으로 카메라에 x축과 y축으로 임의의 좌표 시스템을 정의한다. 카메라가 랜드마크를 랜드마크를 촬영하면 그림 1(b)와 같이 카메라에 지정했던 x축, y축과 랜드마크가 카메라를 향하는 방향을 통해 각도를 계산 한 후 다른 랜드마크와의 원의 방정식을 구해 카메라의 위치를 추정한다. 카메라와 랜드마크만 있으면 각도를 간편하게 계산할 수 있지만, 방의 각 벽면에 모두 랜드마크가 부착되어 있어야 하고, 이 위치를 사전에 반드시 파악하고 있어야한다. 연구 [13]의 경우, 하나의 프레임만 필요하고 초점거리를 따로 구하지 않아도 된다는 점에서 앞의 한계들을 극복할 수 있다[13]. 해당 연구는 그림 2와 같은 방법으로 카메라와 특징점 간의 각도를 구한다. 하지만 랜드마크 방향의 각도를 구하는 것이 아니라 카메라 방향의 각도를 구한다. 그렇기에 카메라에서 수직상에 있는 기준이되는 특징점 하나, 랜드마크에 있는 특징점 하나, 이렇게 두 개가 따로 필요하다. 그림(Fig.) 2. 움직이는 대상과 카메라 간의 각도 계산 알고리즘 (Angle calculation algorithm between moving object and a camera) 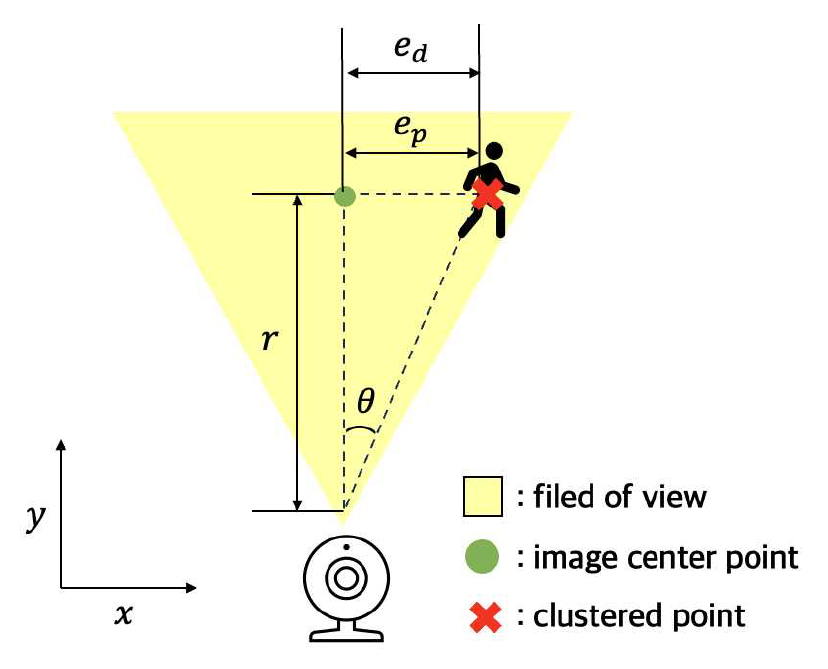 본 논문에서는 랜드마크 방향의 각도를 구하기 때문에 이미지 내의 중점을 기준점으로 설정한 후, 기준점과 화면상의 랜드마크 x좌표의 차이를 통해 각도를 구하기 때문에 따로 기준점을설정할 필요가 없다. 앞서 논했던 연구들은 모두 추가적으로 초점 거리 같은 변수나 센서가 필요하거나, 카메라의 촬영 방법에 제약이 존재한다. 하지만 랜드마크를 방 한 곳에만 놓고 랜드마크를 향하게만 촬영하면 각도를 구할 수 있다. 이렇게 인프라나 특정 센서가 없는 환경에서 단지 스마트폰 카메라와 랜드마크 하나만 가지고 각도를 계산하여 측위를 진행한다는 점에서 앞선 한계들을 극복할 수 있다. 알고리즘을 통해 각도를 이용하여 측위를 진행하는 방법들은 [9]~[13]처럼 꾸준히 연구가 진행되어왔다. 하지만 인공지능을 통한 사례는 연구된 바를 찾기 어렵다. 따라서 3장에서 인공지능을 통한 방법을 직접 구현하여 알고리즘으로 계산하는 방법과 비교해보려 한다. Ⅲ. 카메라를 이용한 Angle Detection실내 측위를 진행하기 위해서는 거리와 각도 두 가지가 필요하다. 랜드마크와 카메라 사이의 거리는 계산으로 구하기에 한계가 있으므로 Depth 추정 같은 인공지능 모델을 사용하는 것이 합리적이다[14]. 하지만 각도는 단순한 계산 혹은 추정하는 방법을 통해 더 적은 자원으로 구할 수 있다. 3.1 딥러닝 기반 각도 추정 방법딥러닝을 통한 실내 측위에 대한 연구는 활발히 진행 되어왔다[14-18]. 하지만 모두 거리를 추정하거나, 무선 신호 등을 딥러닝으로 처리하기 때문에 본 논문의 방법과는 차이가 있다. 카메라와 랜드마크 간의 거리를 인지한 후, 이미지 내에서 중점과 랜드마크 간의 픽셀 차이가 주어졌을 때 각도를 인공지능 학습을 통해 추론하는 연구는 이전에 진행된바가 없다. 따라서 직접 추론하는 모델을 구현하여 4장에서 알고리즘 방식과 비교 분석을 진행할 예정이다. 구현된 각도 추론 모델은 그림 3과 같이 구성된다. 변수 추론을 위한 회귀를 진행하는 MLP(Multi-Layer Perceptron) 형태로 설계되었으며, loss 함수로는 MSE(Mean Squared Error)를 사용하였다. 학습 라벨은 각 이미지 촬영 시의 지점 위치와 랜드마크 상대 위치를 기반으로 계산된 실제 각도를 이용하여 구성되었다. 입력 값이 되는 독립변수는 이미지 내 x축의 차이 84개로 설정하였고, 종속변수는 실제 각도 84개를 기준으로 학습하였다. 모델은 한 개의 입력층, 세 개의 은닉층, 한 개의 출력층으로 구성하였다. 은닉층의 노드 수는 각각 100개, 50개, 10개로 이루어져 있고, 활성화 함수로는 Relu를 사용하였다. 학습률은 0.001로 시작하여 동적으로 조정되는 적응형 학습률을 적용하였다 최종적으로 MLP모델을 사용해 85개의 데이터로 학습을 수행하고, 나머지 34개의 데이터로 추론을 진행하였다. 3.2 각도 추론을 위한 환경 구축본 연구에서는 랜드마크와 카메라 간의 각도를 계산할 수 있도록 랜드마크를 촬영한 이미지를 데이터로 사용하였다. 랜드마크는 세로 30cm, 가로 15cm의 인형을 사용하였다. 이 랜드마크는 실내 내부 적절한 위치에 직접 배치되어 촬영되었다. 데이터 구축은 휴대폰에 내장된 카메라를 이용했다. 그림 4는 랜드마크와 이미지를 촬영한 지점을 좌표로 나타낸 것이다. 각 점들의 간격은 세로 간격은 40cm, 가로 간격은 35cm로, 일정한 간격으로 이동하며 랜드마크를 향해 총119 장의 사진을촬영했다. 각각의 지점은 (0,0), (0,1)과 같이 좌표의 한 점을 의미한다. 이와 같은 방식으로 촬영한 예시 이미지는 그림 5와 같다. 각 지점에서 랜드마크를 향해 다각도로 촬영하여 이미지 데이터셋을 구축하였다. 붉은색 동그라미를 친 부분은 랜드마크를 나타낸다. 3.3 이미지 기반 Angle Detection 과정그림 6은 각도 추정 과정을 위에서 바라본 개념도로, 전체적인 시스템과 과정을 나타낸다. 그림 7은 휴대폰 카메라로 촬영한 이미지를 통해 카메라와 랜드마크 간의 각도 θ를 구하는 개념도이다. 랜드마크가 존재하는 공간은 3차원이지만, 본 연구는 이미지 2D 평면 상의 위치 추정을 목적으로하며, 시스템구현을 위해 방향각 기반 각도 계산이 핵심이다. 이에 따라 카메라와 랜드마크의 수평각인 방위각(azimuth angle)만을 적용하였다. 이미지의 중심은 랜드마크와 직교하는 부분이기 때문에, 이미지의 중심과 랜드마크 픽셀의 차이와 가상의 중심축을 통해 카메라와 랜드마크 사이의 각도를 구할 수 있다. 본 논문에서는 직각삼각형의 역삼각함수 원리를 사용하여 각도를 예측할 수 있는 새로운 알고리즘을 설계하였으며, (1)과 같이 제시한다. 이미지 중심과 랜드마크 위치 간의 픽셀 차이와 실제 거리 정보를 이용하여 카메라와 랜드마크 간의 방향각을 계산한다.
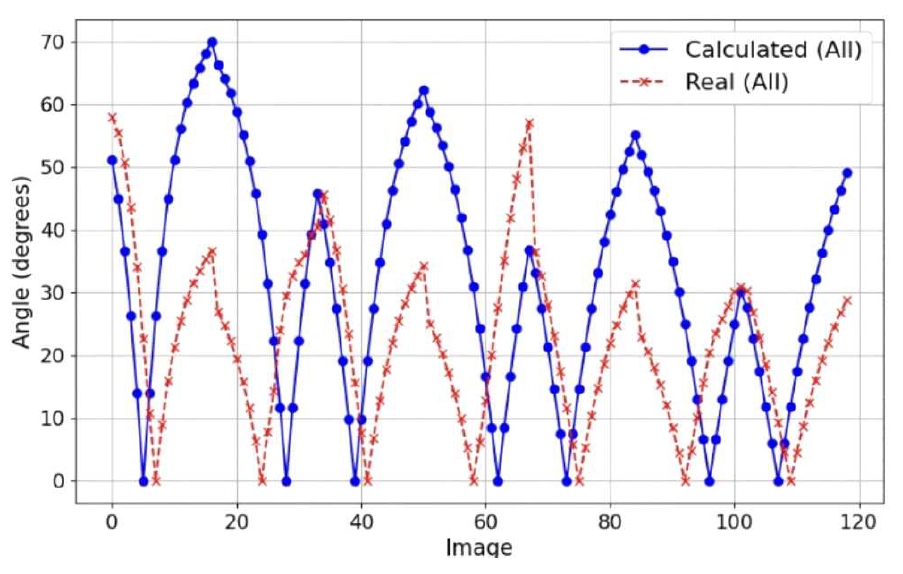
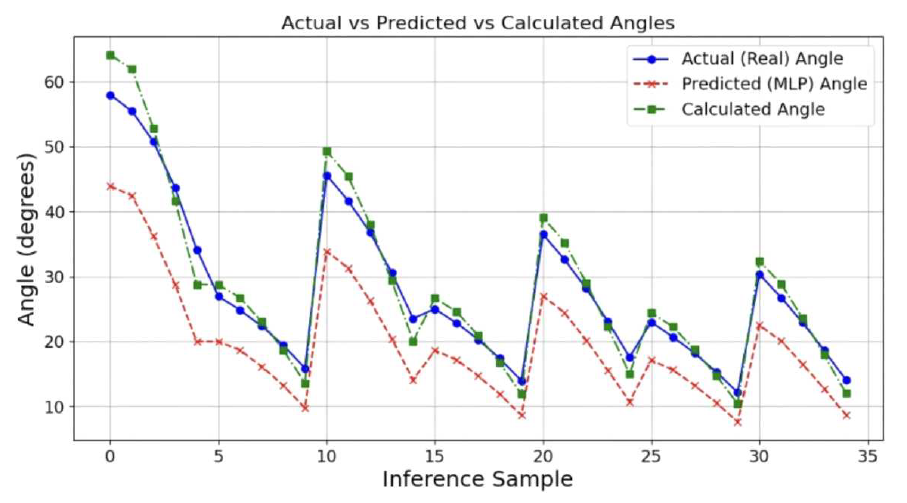
arcsin((delta_x/d))는 이미지 중심에서 랜드마크까지의 픽셀 차이delta_x와 랜드마크와 카메라 간의 실제 거리 d의 비율을 입력 값으로 받아 각도를 구하는데 사용된다. 실제 거리 d는 직접 거리를 측정하거나 depth 추정 모델을 통해 얻을 수 있지만, 본 논문에서는 직접 측정하는 방식으로 실제 거리를 구하였다. (delta_x/d)는 이미지 중심에서 랜드마크의 픽셀 차이와 거리의 비율을 나타내며, 카메라가 랜드마크로부터 얼마나 기울어져 있는지를 의미한다. 즉, 랜드마크가 이미지의 중심에서 얼마나 벗어나 있는지를 정량적으로 나타내는 값을 의미한다. arcsin 함수는 기본적으로 각도를 라디안(radian) 단위로 반환한다. 그러나 일반적으로 각도는 도([TeX:] $$^\circ$$, degree) 단위로 해석하기 때문에, 이를 변환하기 위해 (180/π)를 곱한다. 이를 통해 최종적으로 라디안 단위의 값을 도 단위로 변환할 수 있다. 또한, 실내 환경에서 카메라의 위치가 랜드마크를 기준으로 좌우 어느 방향에 놓이는지에 따라 결과 값이 양수 또는 음수가 될 수 있다. 하지만 일관된 방식으로 각도를 해석하기 위해 절대값을 취해 양의 각도값을 얻는다. 이로써 카메라와 랜드마크 사이의 각도 θ를 구하기 위한 계산이 이루어진다. Ⅳ. 구현 및 성능 평가본 논문에서 제안한 방법을 검증하기 위하여 위의 알고리즘으로 계산한 각도와 실제 각도를 먼저 분석해보았다. 그 결과는 그림 8, 그림 9와 같다. 위의 7개 그래프는 실내에서 사진을 촬영했던 각 줄에 대한 계산 결과와 실제 값을 비교한 그래프이고, 그림 9는 이를 모두 합쳐서 전체 이미지를 실제 값과 비교한 그래프이다. 모든 행의 각도의 패턴은 비슷하므로, 각 행 단위로 비교와 이에 대한 합을 비교하였다. Angle Detection을 수행한 결과, 계산된 각도 값이 실제 값과 매우 유사한 형상을 띄고 있음을 확인할 수 있다. 그림 8과 그림 9에서는 파란 선(Calculated)이 알고리즘을 통해 계산된 각도를 나타내고, 빨간 선(Real)이 실제 측정된 각도를 나타낸다. 두 그래프를 분석함으로써 알고리즘이 얼마나 정확하게 각도를 추정하는지 분석할 수 있다. 특히, 카메라가 실내의 중간에서 랜드마크를 정면으로 바라보도록 설정된 환경에서 촬영한 이미지의 경우, 이론적으로 해당 이미지의 각도는 0도가 되어야한다. 실험 결과, 이러한 조건에서 예측된 각도 값 역시 0도에 근접하게 계산되었으며, 이는 알고리즘이 신뢰할 만한 결과를 도출할 수 있음을 의미한다. 그림 9는 각 행 별 분석 결과를 하나의 그래프에 통합하여 제시함으로써 전체적인 경향을 더욱 직관적으로 파악할 수 있도록 표현하였다. 그림 8에서는 각 행별로 분석이 이루어져 국소적인 패턴을 확인하기 용이한 반면, 그림 9에서는 모든 데이터를 한눈에 비교할 수 있어 데이터 전반적으로 일관된 성능을 유지함을 보다 명확하게 확인할 수 있다. 그림 9 역시 계산된 각도값이 실제 측정 값과 비슷한 패턴을 보이며, 각도 측정에 적합한 알고리즘이라는 것을 증명한다. 결과 그래프에서 나타났던 이상치는 실내 조명, 자연광 혹은 이미지의 품질 저하로 인해 발생된 것으로 판단된다. 이러한 요인을 정밀하게 보정할 경우 더욱 정확한 예측이 가능할 것으로 판단된다. 그림 10은 MLP 기반 딥러닝 모델을 사용하여 추론한 결과와 실제 각도 값(Real Angle) 그리고 본 논문의 알고리즘을 통해 계산한 각도 값(Calculated Angle)을 모두 비교하여 나타낸 그래프이다. 그래프에서 파란 선은 실제 측정된 각도, 녹색 선은 MLP모델을 통해 추론한 각도, 그리고 빨간 점선은 알고리즘을 이용해 계산된 각도를 나타낸다. 이를 통해 제안된 알고리즘이 딥러닝 모델과 어떠한 성능적 우위를 가지는지 비교할 수 있다. 데이터를 학습 데이터와 추론 데이터로 분리해야 하므로 그림 4에 나타나는 좌표 중 각 행의 앞의 5개 좌표를 추론용 데이터로 사용하여 비교 분석을 수행하였다. 그래프를 분석해보면 MLP 모델을 사용한 경우에도 실제 각도 값과 유사한 패턴을 보이는 것을 확인할 수 있다. 그러나 정밀하게 살펴보면, MLP를 이용한 방법은 일부 구간에서 실제 값과 다소 차이를 보이며, 특히 최대값 및 최소값 부근에서 오차가 증가하는 경향이 나타난다. 이로써 알고리즘을 통한 방법이 딥러닝을 통한 접근 방법보다 효과적인 방법임을 도출할 수 있다. 그림 11을 통해 계산량에 있어서도 알고리즘 방법이 압도적으로 효율적인 것을알 수 있다. 연산량의 비교는 FLOPS(Floating Point Operations Per Second)를 통해 진행했다. 이는 초당 부동소수점 연산으로 컴퓨터가 1초동안 수행할 수 있는 부동소수점 연산의 횟수를 기준으로 정의한다. 딥러닝을 통한 추론에 사용된 FLOPS 값은 967,385로 나온 반면, 알고리즘을 통한 계산에 사용된 FLOPS 값은 1,904밖에 사용되지 않았다. 그림(Fig.) 11. 인공지능과 알고리즘 방법의 연산량 비교 결과 (Computation cost comparison result between AI method and Algorithm method) 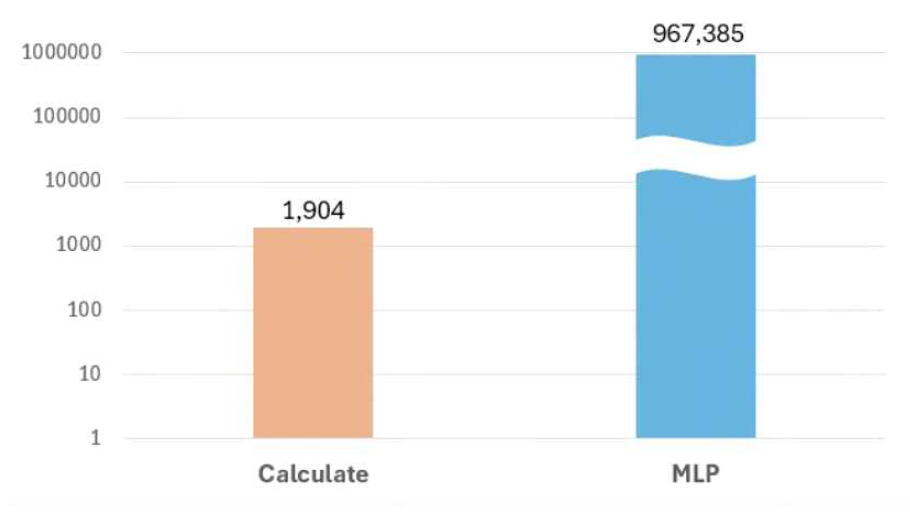 이러한 분석을 종합하면 본 논문에서 제안한 알고리즘은 딥러닝 기반 모델보다 계산 효율성이 높을 뿐만 아니라 추론 정확도에서도 더욱 우수한 성능을 보인다는 점을 확인할 수 있다. 복잡한 모델 학습 과정 없이도 간단한 계산을 통해 높은 정확도를 유지할 수 있다는 점에서 다양한 실내 환경에서 활용될 수 있다. 단순히 휴대폰 단일 카메라를 통해 랜드마크 기반의 각도를 획득할 수 있음을 통해 카메라 기반 실내 측위의 새로운 방법을 제시할 수 있다. Ⅴ. 결 론본 논문에서는 센서나 인프라의 제약 없이 하나의 카메라만을 가지고 수행할 수 있는 실내 측위 방법을 제안하였다. 기존의 실내 측위 방식은 일반적으로 추가적인 하드웨어나 별도의 인프라를 요구하는 경우가 많기 때문에 활용 범위가 제한적이었다. 반면 본 연구에서는 단일 카메라 기반의 접근 방식을 제안함으로써 비용 절감과 실용성을 극대화하면서도 높은 정확도의 측위가 가능함을 보였다. 특히 본 논문에서 제안하는 알고리즘 방법과 학습을 통한 딥러닝 방법의 상호 비교 분석을 진행한 결과 알고리즘을 사용한 방법이 더욱 합리적임을 입증하였다. 추가적인 학습을 수행해야 하는 딥러닝 모델에 비해 제안 알고리즘 방식은 단순한 계산만으로 높은 정확도를 유지할 수 있다. 따라서 빠른 적용이 가능하며 정확하고 안정적인 성능을 보일 수 있는 강점을 가진다. 하지만 본 연구는 간단한 계산 기반을 중시하여 MLP 모델을 사용하였다. 그러나 보다 심화된 이미지 분석이 요구되는 상황에서는 CNN (Convolution Neural Network) 같은 이미지 처리 모델을 사용할 수 있다. 향후 이 논문을 발전시켜 다양한 딥러닝 모델과의 비교 연구를 통해 알고리즘 기반 접근과의 성능 차이를 더욱 정밀하게 분석한다면 더욱 효율적인 비교 분석을 수행할 수 있을 것이다. 실내 측위는 대형 건물에서 건물의 구조를 파악해 사용자의 위치를 추정하여 길찾기 같은 기능을 지원하거나, 건물의 보안을 강화하기 위해 사용된다. 또한 환경 모니터링 및 건물 내 자동화 시스템 등 다양한 편의를 주기 위한 방법 등 다양하게 사용된다. 실내 측위를 진행하기 위해 휴대폰으로 이미지를 촬영한 후 거리를 추정하는 딥러닝 모델로 거리 정보를 획득하고, 본 논문에서 제안한 알고리즘으로 각도 정보를 획득한 후에, 이 두 정보를 종합한다면 더욱 향상된 실내측위 방법론을 제안할 수 있을 것이다. BiographyBiographyBiographyReferences
|
StatisticsCite this articleIEEE StyleY. Cho, S. Jang, J. Lee, "An Angle Estimation Scheme for Single Camera-Based Indoor Positioning," The Journal of Korean Institute of Communications and Information Sciences, vol. 50, no. 11, pp. 1802-1810, 2025. DOI: 10.7840/kics.2025.50.11.1802.
ACM Style Youngchae Cho, Soyoung Jang, and Jaeho Lee. 2025. An Angle Estimation Scheme for Single Camera-Based Indoor Positioning. The Journal of Korean Institute of Communications and Information Sciences, 50, 11, (2025), 1802-1810. DOI: 10.7840/kics.2025.50.11.1802.
KICS Style Youngchae Cho, Soyoung Jang, Jaeho Lee, "An Angle Estimation Scheme for Single Camera-Based Indoor Positioning," The Journal of Korean Institute of Communications and Information Sciences, vol. 50, no. 11, pp. 1802-1810, 11. 2025. (https://doi.org/10.7840/kics.2025.50.11.1802)
|