IndexFiguresTables |
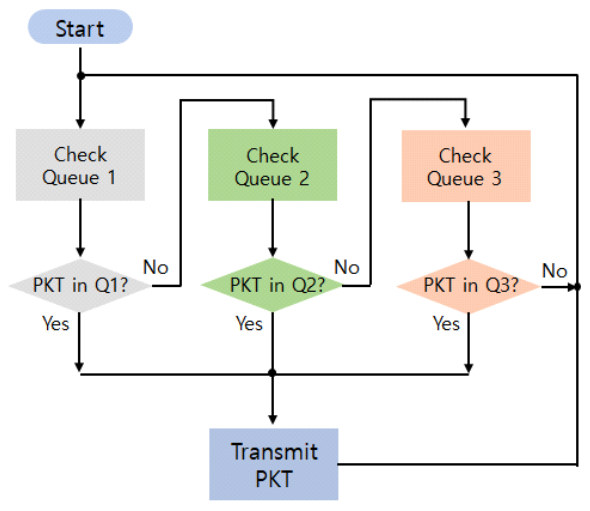
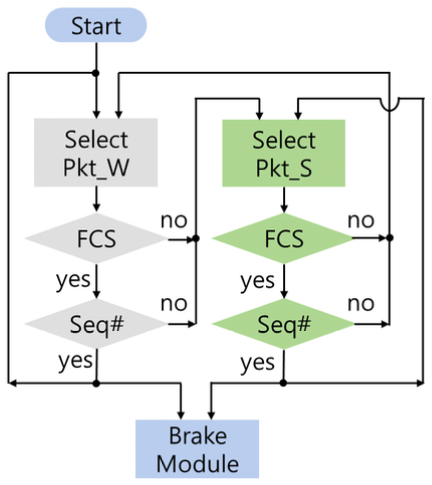
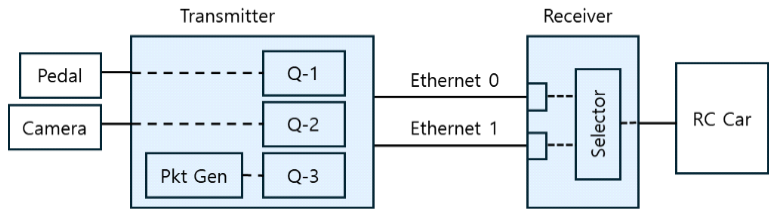
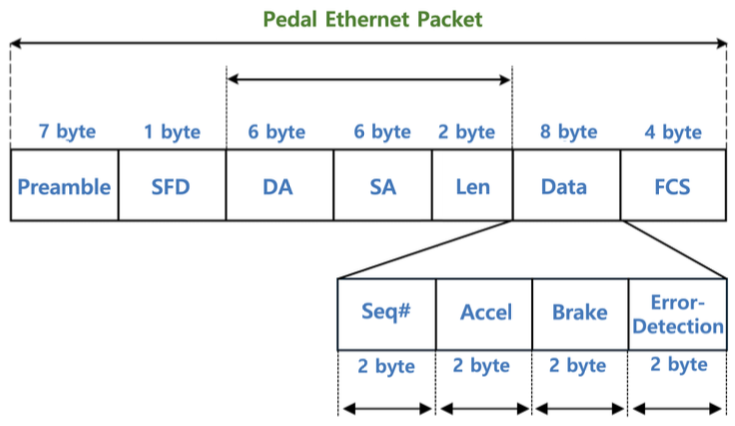
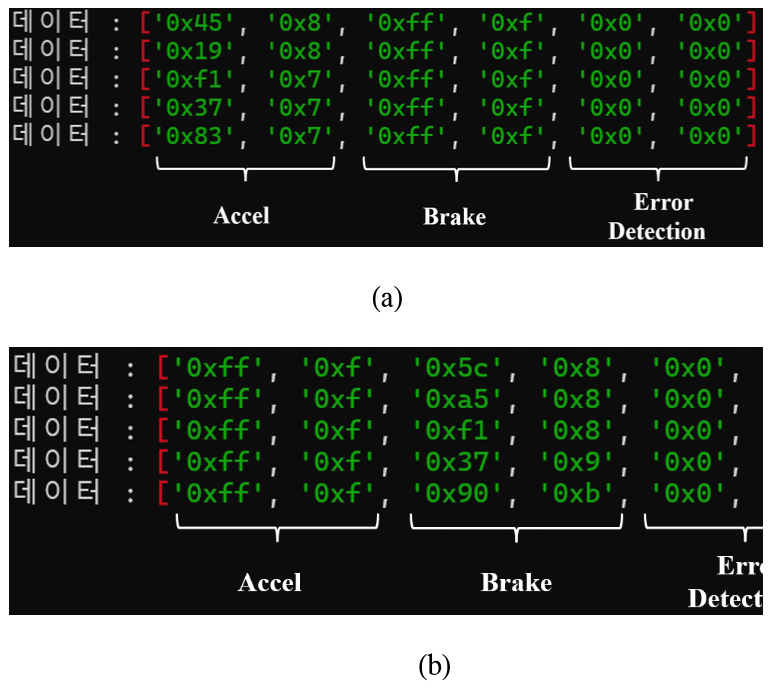
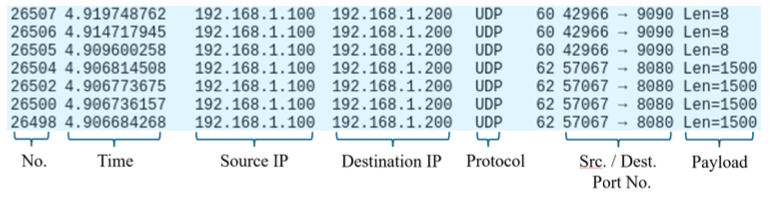
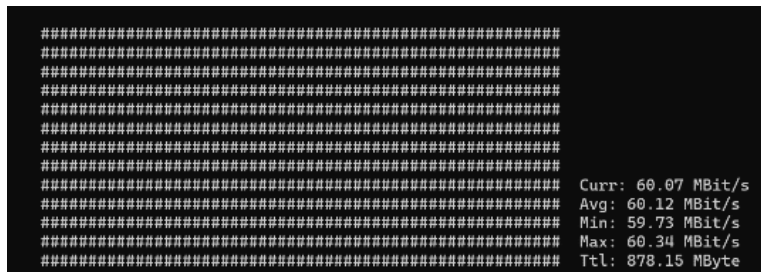
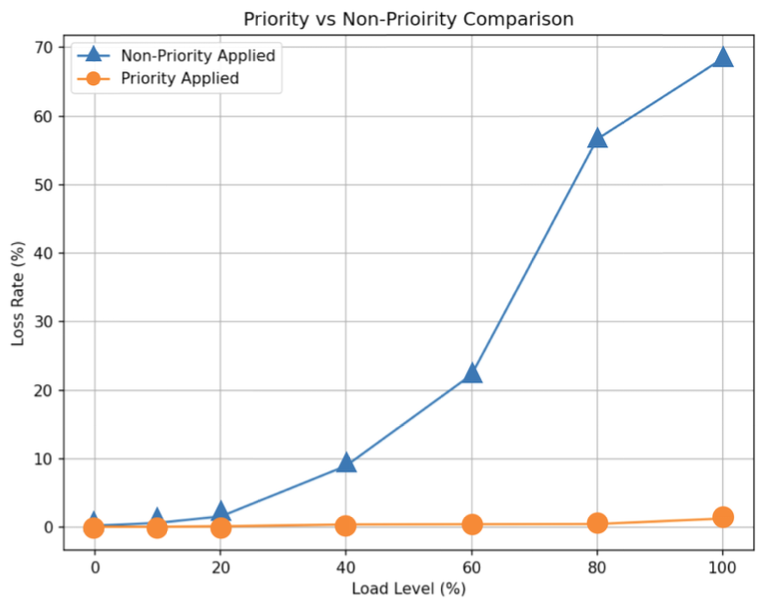
Changkyun Park♦ , Sehyeong Ryu* , Sungjin Jeong* , Jihyeon Min* and Youngil Park°A Study on Multi-Queue-Based Ethernet Data Transmission for Automotive Brake SystemsAbstract: This paper proposes a scheme to enhance the reliability and safety of an Ethernet-based braking system in vehicles, in the context of increasing in-vehicle Ethernet usage. A multi-queue mechanism with different priorities is applied to ensure the latency of brake signals, even in environments where various types of packets are transmitted over the Ethernet link. Additionally, to minimize data loss and recovery time in the event of a link failure, an improved method that addresses the limitations of conventional Ethernet redundancy techniques is proposed. Experimental results show that even under a high link utilization of 80%, packets meet the required latency constraints, and the recovery time after a link failure is reduced to 7.9 msec. The proposed approach demonstrates that a safe and highly reliable Ethernet-based brake system can be realized for ADAS and autonomous vehicles. Keywords: Priority Transmission , Ethernet Redundancy , Automotive Brake 박창균♦, 류세형*, 정성진*, 민지현*, 박영일°차량 브레이크 시스템을 위한 다중 큐 기반 이더넷 데이터 전송 연구요 약: 본 논문은 차량 내 이더넷 사용이 점차 늘어나는 환경에서 이더넷을 적용한 차량 브레이크 시스템의 신뢰성과안전성을 향상하는 기술을 제안한다. 본 논문에서는 이더넷 링크에 다양한 종류의 패킷이 전송될 때 우선순위가다른 다중 큐 방식을 적용하여 브레이크 신호의 지연시간을 보장하였다. 또한 링크 장애 상황에서도 데이터 손실및 복구 시간을 최소화하기 위해 기존 이더넷 이중화 방식의 단점을 보완하는 방안을 제시하였다. 실험을 통해 링크 부하율 80% 환경에서도 패킷이 요구 지연시간 내에 도달하고, 또한 링크 장애 상황에서도 전송 복구 시간을7.9 msec로 단축할 수 있음을 확인하였다. 본 논문의 제안 방식을 이용해 ADAS 및 자율주행 차량에서 안전하고신뢰성 높은 이더넷 기반 브레이크 시스템을 구현할 수 있음을 보였다. 키워드: 우선순위 전송, 이더넷 이중화, 차량용 브레이크 Ⅰ. 서 론최근 자율주행 기술의 급격한 발전으로 인해 레이더, 라이다, 카메라, 초음파 등 다양한 센서가 이용되며, 이들 센서에서 생성되는 데이터의 양이 기하급수적으로 증가하고 있다. 이러한 대규모 데이터 트래픽을 효과적으로 처리하기 위해 CAN (Controller Area Network), FlexRay 등 기존 차량 네트워크를 대체할 방식이 필요하게 되었다. CAN은 구조가 간단하고 신뢰성이 높아서 ECU 연결에 가장 많이 이용되는 통신 방식이며, FlexRay는 CAN에 비해 높은 전송 속도와 이중화 구조를 가능하도록 함으로써 X-by-Wire 시스템 적용에 유용하다. 그러나 이들의 최대 전송속도는 각각 1 Mbps 및 10 Mbps 로서 수십 Mbps 이상의 속도를 요구하는 자율주행용 센서 데이터를 처리하기에는 어려움이 있다[1]. 이를 대체하려는 목적으로 차량용 이더넷이 등장하였다. 차량용 이더넷은 10 Mbps, 100 Mbps, 1 Gbps 등 다양한 전송속도를 가지고 있으며, 차량 이용에 적합하도록 케이블의 무게를 줄이고, 전자기파 간섭에 강하도록 설계되고 있다. 또한 이더넷에 TSN (Time Sensitive Networking) 방식을 도입하여 실시간성과 QoS(Quality of Service)를 보장함으로써 자율주행 제어 시스템에 적합한 네트워크 환경을 제공한다[2]. 한편, X-by-Wire 시스템은 기존의 기계식 및 유압식 시스템을 전선과 전자부품으로 대체하는 방식을 말하며, 차량의 무게를 줄이고 정밀한 제어가 가능하므로 데이터를 기반으로 차량을 제어하는 ADAS(Advanced Driver Assistance System) 및 자율주행 시스템에 매우 필수적인 기술이다[3]. X-by-Wire 시스템 구현을 위해 다양한 네트워크가 이용될 수 있지만 본 연구에서는 특별히 이더넷을 이용하고자 한다. 고속 네트워크 필요성에 의해 차량의 인프라가 점차 이더넷으로 대체되는 환경에서 자율주행 및 ADAS 장치 제어에 X-by-Ethernet 시스템이 매우 효율적으로 이용될 수 있을 것이다[4]. 특별히, 본 논문에서는 안전에 민감한 브레이크 제어에 이더넷을 적용하는 Brake-by-Ethernet 구조를 적용한다. 브레이크 시스템은 ISO 26262에서 정의된 가장 높은 안전 무결성 등급인 ASIL-D로 분류될 만큼 중요한 장치이며[5], 특히 미래의 차량 네트워크가 이더넷 기반으로 통합되는 과정에서 브레이크 시스템 역시 궁극적으로 이더넷으로 전환될 필요성이 있다. 그러나 기존의 브레이크 시스템은 여전히 Flex Ray 등 결정성과 신뢰성을 보장하는 별도의 통신 방식을 사용하고 있으며, 브레이크 페달과 유압 계통 간의 기계적 연결을 배제하고 전기 신호로만 제동을 제어하는 Brake-by-Wire 기술을 기반으로 한다[1]. 따라서 본 연구에서는 이와 같은 Brake-by-Wire 기술과 이더넷 통신의 결합을 통해, 중앙 ECU와 브레이크 ECU의 협력 제어가 운전자 의도와 자율주행 제동 기능에 맞도록 동작하면서도 차량 제동 안전성과 신뢰성을 더욱 향상시키는 것을 목표로 한다. 특히 차량 내 고속 이더넷이 브레이크 신호 뿐 아니라 다양한 신호와 함께 사용되는 고부하 환경에서도 안 정적으로 Brake-by-Ethernet을 구현할 수 있음을 실험적으로 검증하고자 한다. Brake-by-Ethernet을 미래 자동차에 적용하기 위한 가장 중요한 특성은 저지연과 신뢰성이라 할 수 있다. 지연시간은 브레이크 페달 ECU에서 메시지가 생성된 시점부터 브레이크 액추에이터 ECU에 도달할 때까지의 통신 지연을 의미하며, SAE J2735 표준에 따르면, 긴급 제동(Emergency Electronic Brake Light, EEBL)과 같은 고우선순위 안전 메시지는 최대 10 msec 이내에 전달되어야 한다[6]. 이더넷을 통해 다양한 종류의 패킷을 전송하는 경우 브레이크 신호에 높은 우선순위를 할당함으로써 이 문제를 해결할 수 있다. 또한 신뢰성은 열악한 환경에서 운행중에도 브레이크의 동작을 확보할 수 있어야 함을 의미하며 링크의 이중화를 이용해 신뢰성을 제고할 수 있다. 현재 차량 브레이크에 널리 이용되고 있는 FlexRay 또한 이중화 기능을 제공함으로써 신뢰성을 높이고 있다. 본 연구에서는 이더넷을 이용한 브레이크 시스템을 위해 우선순위 큐잉 기법과 이중화 방안을 제시하였다. 또한 이를 구현하고, 높은 부하율 상황에서의 데이터 손실과 링크 사고 시 다른 링크로의 전환에 걸리는 시간을 측정함으로써 실시간성과 신뢰성을 검증하였다. Ⅱ. 본 론차량에서 안전에 가장 중요한 브레이크 시스템에 이더넷을 적용하기 위해서는 트래픽이 많아도 짧은 지연 시간 내에 신호를 전송할 수 있어야 하며, 장애 상황에서도 안정적으로 신호를 도달하게 하는 신뢰성이 매우 중요한 요인이다. 이를 위해 본 연구에서는 브레이크 신호의 우선순위를 높이기 위한 다중 큐 방식과, 링크 이중화를 통한 신뢰성 방식을 다음과 같이 제안하였다. 2.1 다중 큐에 의한 우선순위 제공본 시스템에서는 다양한 데이터가 함께 전송되는 이더넷에서 브레이크 정보의 전송지연을 최소화하기 위해 우선순위에 차이를 둔 다중 큐 시스템을 도입하였다. 즉, 데이터의 우선순위에 따라 패킷을 별도로 저장하기 위해 그림 1과 같이 3개의 큐를 이용하여 높은 우선순위에 있는 데이터를 먼저 전송한다. 큐 1은 가장 높은 우선순위를 가진 데이터의 버퍼로 활용하고, 전송 주기 5 msec를 갖는 브레이크 데이터는 이곳에 저장하고 전송하였다. 큐 2는 두 번째 우선순위를 갖는 데이터를 저장하는 데 이용하고, 전송 주기 33 msec를 갖는 카메라 데이터를 저장한다. 큐 3은 인포테인먼트 데이터 저장에 이용한다. 따라서 브레이크 관련 신호가 발생하면 큐 1에 저장되어 다른 큐에 저장된 신호에 우선하여 전송된다. 위 다중 큐 방식은 이더넷 TSN (Time-Sensitive Networking) 에서 정의하는 Preemption 기능을 구현하기 위한 방식이라고 할 수 있다[1,3]. 이들 3개의 큐를 통해 전송에 사용하는 이더넷 데이터의 발생 및 성능 측정에는 네트워크 대역폭 측정을 위한 오픈 소스 명령어 기반 도구인 iperf3 툴을 이용하였다[7]. 2.2 링크 이중화 기법이더넷 패킷을 전송하는 과정에서 발생하는 링크 장애에 대처하기 위해 여러 종류의 이중화 방식이 이용되고 있다. 링크 어그리게이션 (Link aggregation) 방식은 IEEE 802.1ad에서 표준화된 기술로 여러 개의 이더넷 링크를 한 개의 논리적 링크로 결합하여 대역폭을 증가하고 이중화를 지원하여 사고 복구 기능을 제공하는 이더넷 기술이다. 여러 개의 이더넷 링크를 한 개의 논리적 링크로 결합하는 또 다른 방식으로 이더넷 본딩(bonding)을 들 수 있다. 이 방식은 표준화된 기술은 아니지만, 주로 리눅스 시스템에서대역폭 증가 및 사고 복구에 이용되는 방식으로, 스위치의 지원이 필요하지 않고 필요에 따라 다양한 모드를 사용할 수 있다. 링크 장애 발생 시 링크 어그리게이션 방식은 LACPDU 패킷을 주기적으로 송수신 함으로써 장애를 감지하고 전환하는데 1초 이상의 시간이 걸리므로 브레이크처럼 지연에 민감한 영역에는적절하지 않다. 따라서 본 연구에서는 링크 이중화에 지연시간이 더 짧은 본딩 방식을 이용하였다. 본딩의 여러 가지 모드 중 Active-backup 모드는 하나의 링크만 활성화 상태로 두고 나머지는 대기 상태로 유지한후, 주기적으로링크 상태를 확인하여 장애가 발생할 때 대기 중인 링크를 활성화하는 방식이다. 이 경우 링크 전환에 수백 msec 이내의 지연시간이 필요하다. 반면, Broadcast 모드는 두 개 링크로 동일한 패킷을 전송하고 수신부에서는 그 중 한 개를 선택했다가 문제가 발생할 경우 다른 링크에서 수신되는 패킷으로 전환하는 방식이다[8]. 이 경우 수신부에서는 두 링크로부터 수신되는 신호 중 하나를 선택하므로 지연시간이 거의 없어야 하지만, 실제로는 3.2 실험 결과와 같이 약 400 msec의 지연시간이 발생하였다. 이는 NIC (Network Interface Card)에서 링크 장애를 감지하고 커널에 보고하기까지 발생한 시간으로 보이며, 브레이크 신호에서 요구하는 지연시간보다는 여전히 너무 큰 값이다. 본 연구에서는 위 지연시간을 더욱 줄이기 위해서 송신부에서는 두 링크를 본딩하여 동일한 패킷을 동시에 전송하되, 수신부에서는 개별 인터페이스로 각각 수신한 뒤 자체적으로 오류가 없는 패킷을 선택하는 방법을 이용함으로써 지연시간을 최소화하는 방식을 제안한다. 수신부에서 두 개 이더넷 포트로 들어온 패킷 중 하나를 선택하는 과정을 아래 그림 2에서 보인다. 송신부에서 이더넷-0 포트로 전송하는 패킷을 동작 패킷(Pkt_W)으로, 이더넷-1 포트를 이용해 전송하는 패킷을 대기 패킷 (Pkt_S)으로 두었으며, 초기에는 Pkt_W를 수신하고 이 신호의 FCS (Frame Check Sequence)값과 패킷 순서를 확인한다. 만일 사고로 오류가 발생했다면 FCS 값이 정상이 아니며, 패킷 순서 오류는 시퀀스 번호(Seq#)를 통해 알 수 있다. 둘 중 하나에 오류가 발생하는 경우 수신부는 Pkt_S 신호를 대신 수신하여 유효성을 확인한 후 선택하고 이를 이용하여 브레이크 모듈을 제어한다. Ⅲ. 실험 환경 및 실험 결과3.1 Brake-by-Ethernet 실험 환경본 연구에서 제안하는 Brake-by-Ethernet 시스템 시험을 위해 그림 3과 같은 실험 환경을 구성하였다. 두 대의 라즈베리파이(Raspberry Pi 4 Model B)를 이용해 송신부와 수신부 ECU를 구성하였다. 송신부는 USB 인터페이스를 통해 가속/감속 페달(CAMMUS CP5) 신호와 카메라 (Intel Real-Sense D435i) 신호를 각각 수집한다. 이때 페달로부터 정보를 1 msec 주기로 수집하며 이를 다시 그림 4와 같이 이더넷 패킷에 매핑하여 수신부 ECU로 전송한다. 이때 이더넷 패킷은 시퀀스 번호, 가속 정보, 감속 정보 및 에러 검출 필드로 8바이트 데이터를 구성하였으며, SAE J2735 표준을 만족하도록 두 개의 링크에 5 msec 주기로 전송하였다[6]. 한편, 카메라에서는 주사율 30 FPS (Frame Per Second) 영상 데이터를 수집한 후 1500 바이트 길이의 이더넷 패킷을 이용해 1초에 30회 주기로 전송한다[9]. 위 두 종류 패킷은 각각 큐 1 및 큐 2에 저장한다. 또한 송신부에서는 자체적으로 1500 바이트 크기의 이더넷 패킷을 발생하여 인포테인먼트 데이터 대신으로 이용하였으며 큐 3에 저장한다. 이 패킷의 주기를 조절함으로써 네트워크 부하율을 변화하며 성능을 측정하였다. 데이터 전송은 우선순위에 따라 이루어지며, 링크 이중화를 위해 두 개의 독립된 이더넷 인터페이스, 즉, 라즈베리파이 내장 이더넷 포트를 통한 Ethernet 0 및 USB-이더넷 랜 카드를 통한 Ethernet 1 포트를 이용하였다. 수신부 라즈베리파이 보드는 위 3가지 종류의 데이터를 수신하고, 이중 페달 데이터가 수신되면 두 개 이더넷 포트 중 한 개를 선택하여 RC카에 가감속 제어 명령을 전달하는 역할을 수행한다. 그림 5는 실험에 이용된 송수신부, 페달, 카메라, RC카 등으로 구성된 실험 장치를 보이고 있다. 송신부에서 USB 포트를 통해 수집한 페달 정보를 그림 6에 보인다. 그림 6(a)는 가속 페달을 작동할 때의 수신 데이터이며, 이때 앞 부분의 가속 데이터가 연속적으로 변화하고 뒷부분의 감속 데이터는 모두 1로 고정된 것을 볼 수 있다. 그림 6(b)는 감속 페달을 작동할 때의 수신 데이터에 해당하며, 이때는 앞 부분의 가속 데이터가 모두 1로 고정되고 뒷부분의 감속 데이터가 시간에 따라 변화하는 것을 확인할 수 있다. 이렇게 수신된 페달 데이터는 우선순위가 가장 높은 큐 1에 저장되고 이후 전송에 이용되며, 수신부에 연결된 RC카의 모터 출력 제어에 이용되었다. 본 연구의 실험에서 페달 및 기타 데이터 패킷의 전송 주기, 패킷 수신 여부, 지연시간 등을 확인하기 위해 네트워크 분석 툴인 Wireshark를 활용하였다. Wireshark는 네트워크 인터페이스를 통해 송수신되는 패킷을 실시간으로 캡처하고 분석할 수 있는 오픈소스 패킷 분석 도구로서 이더넷 계층부터 응용 계층까지 다양한 프로토콜을 시각적으로 확인할 수 있다[10]. 그림 7은 Wireshark로 수신한 브레이크 및 기타 이더넷 패킷을 보여주며, 이들 데이터가 주기적으로 도착하는 것을 확인할 수 있었다. 본 실험에서 이더넷 전송 속도는 100 Mbps를 사용하였으며, 네트워크 부하율을 20%, 40%, 60%, 80%, 100%로 변화시키며 시스템 성능을 측정하였다. 다양한 채널 트래픽 상황을 발생하기 위해서는 iperf3 툴을 사용하였다. 또한, 설정된 부하율이 정확히 반영되었는지를 검증하기 위해 네트워크 대역폭 모니터링 도구인 nload를 사용하였다[11]. 그림 8은 부하율 60% 상황에서 nload 측정 결과를 보여준다. 3.2 성능 시험 결과위 실험 환경에서 설명한 다중 큐 적용 전후의 성능을 시험하기 위해 큐 개수를 1개만 이용해 모든 종류의 패킷을 동일한 큐에 저장하고 입력 순서에 따라 송신하는 경우와 다중 큐를 적용했을 경우의 브레이크 신호의 패킷 손실률을 비교하였다. 자동차 도메인에서 메시지에 허용되는 최대 지연 시간은 주기 시간의 약 10%이며[12], 이를 고려하여 5 msec 전송 주기를 갖는 브레이크 신호는 0.5 msec 이상 크기의 지터가 발생할 경우 도착하더라도 손실로 간주하였다. 그 결과 그림 9과 같이 부하의 증가에따른 패킷 손실률을측정하였다. 우선 순위를 적용하지 않는 경우 부하율이 증가하면 영상 혹은 인포테인먼트 패킷이 큐에 대기하고 있을 확률이 커지면서 브레이크 신호의 지연시간이 길어져서 패킷 손실도 커졌으며, 이는 네트워크 성능을 저하시킨다[13]. 반면 다중 큐를 이용해 패킷 사이에 우선순위를 적용한 경우, 높은 우선순위가 부여된 큐 1의 경우 네트워크 부하가 80% 에 이르는 환경에서도 패킷 손실이 거의 발생하지 않았으며, 이에 따라 실시간성이 유지됨을 확인할 수 있었다. 한편, 본 연구에서는 링크 장애에 대비하기 위해 다양한 이더넷 이중화 방식을 시험하였다. 먼저, Active-backup 모드 및 Broadcast 모드에서 링크 장애로부터 복구에 걸리는 시간을 각 모드에서 5회 측정한 결과는 표 1과 같으며, 평균적으로 각각 815.6 msec 및 399.9 msec의 시간이 걸렸다. 이는 브레이크 신호가 5 msec 주기로 전송되는 것을 고려할 때 각각 163 개 및 80 개의 패킷 손실에 해당하며, 시속 100 km 주행을 가정할 때 22.7m 및 11.1m 의 제동 거리 지연에 해당한다. 따라서 위 두 방식은 브레이크 이중화 방식으로 적용하기에 적절하지 않음을 알 수 있다. 여기에서 Active-backup의 복구 시간이 Broadcast보다 더 긴 이유는 두 모드의 링크 활성화 메커니즘 차이에 있다. Broadcast 방식은 모든 링크에 동일한 데이터를 병행 전송하므로 장애 발생 시 별도의 전환 없이 다른 링크로부터 데이터를 즉시 수신하는 반면, Active-backup 방식은 단일 링크만 활성화된 상태에서 장애 발생 시 백업 링크를 탐지하고 이를 송신부에 전달하고, 링크를 전환하는 과정을 거치므로 더 긴 전환 지연이 발생하였다. Table 1. 링크 이중화에 따른 장애 복구 시간(Failure Recovery Time According to Link Redundancy)
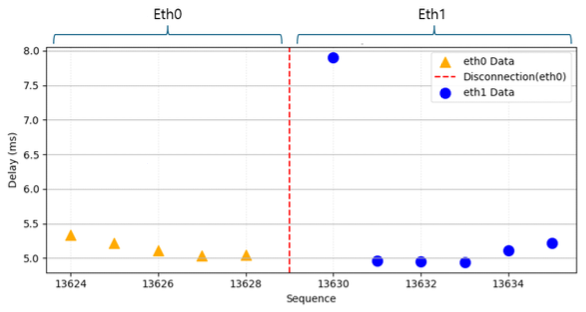
본 연구에서는 위 두 방식의 단점을 보완하기 위해 송신부에서는 Broadcast 기법을 적용하되, 수신부에서는 두 포트로부터 입력되는 이더넷 패킷의 FCS 오류와 패킷 순서를 읽고 이로부터 적절한 패킷을 선택하는 방식을 이용하였다. 위 제안 방식을 적용할 때 링크 장애에 의한 지연 시간 측정 결과를 그림 10에 보인다. 그림에서 가로축은 수신받은 패킷의 순서에 해당하며, 세로 축은 새로운 패킷의 수신에 걸린 시간을 나타낸다. 동작 패킷(Pkt_W)을 Eth0 포트로 수신하다가 장애가 발생하면 대기 패킷(Pkt_S)로 전환되어 Eth1 포트로 수신하는 것을 확인할 수 있다. 단선되지 않은 상황에서는 5 msec 주기로 패킷을 수신하다가 단선 시점에선 7.9 msec에 해당하는 단선 복구 시간을 보인다. 패킷이 5 msec 주기로 전달되는 것을 고려하면 지연 시간은 2.9 msec이며, 이는 패킷 1개의 손실에 해당하는 시간으로 갑작스러운 링크 장애가 발생하더라도 brake-by-Ethernet 기능을 정상적으로 활용할 수 있음을 의미한다. 또한, 본 연구에서 확인한 링크 전환 지연시간인 2.9msec는 SAE J2735에서 권고하는 긴급 제동 메시지의 최대 지연 시간인 10msec를 충분히 만족하는 결과에 해당한다. Ⅳ. 결 론본 논문에서는 차량의 브레이크 시스템에 이더넷을 적용하는 방안을 제시하였다. 차량 브레이크 시스템은 운전자 및 승객의 안전과 직접 연관된 시스템이기 때문에 높은 신뢰성과 안정성이 요구된다. 이를 위해 다른 데이터보다 높은 우선순위로 전달되어야 하며, 링크 장애와 같은 사고 상황에서도 통신의 지속성을 보장하기 위한 이중화 구조가 필요하다. 이를 위해 본 연구에서는 이더넷 TSN에 사용되는 프레임 프리엠션 개념을 브레이크 시스템에 이용할 수 있도록 우선순위 큐잉 기법을 적용하였으며, 네트워크 부하율에 따른 성능 평가를 통해 이 방법의 효용성을 입증하였다. 또한, 이더넷 링크 이중화를 위해 송신부에는 이더넷 본딩 중 브로드캐스트 모드를, 수신부에는 개별 인터페이스 활성화를 통한 선택적 수신을 적용하여 기존의 이더넷 이중화 기법들에 비해 단선 지연시간을 크게 단축할 수 있었다. 본 연구에서 제안한 방식들을 통해 차량 브레이크 제어 데이터의 신뢰성과 실시간성을 동시에 확보함으로써, 향후 자율주행 차량의 안전성 확보에 핵심적인 기반 기술로 활용될 수 있을 것이다. 특히 본 연구는 실제 차량 환경과 유사한 고부하 및 링크 장애 상황을 재현하고, 이를 통해 이더넷 기반 시스템의 실질적 성능과 안정성을 명확히 검증하였다는 점에서 의미가 있다. 본 연구에서 제안된 다중 큐 우선순위 및 수신부 패킷 선택 알고리즘은 향후 완전자율주행차량이나 다양한 X-by-Ethernet 시스템에도 확장 적용 가능한 기술이며, 안전성과 실시간성을 최우선으로 요구하는 차세대 차량 통신망 설계에 유용할 것으로 기대한다. BiographyBiographyReferences
|
StatisticsCite this articleIEEE StyleC. Park, S. Ryu, S. Jeong, J. Min, Y. Park, "A Study on Multi-Queue-Based Ethernet Data Transmission for Automotive Brake Systems," The Journal of Korean Institute of Communications and Information Sciences, vol. 50, no. 12, pp. 1966-1973, 2025. DOI: 10.7840/kics.2025.50.12.1966.
ACM Style Changkyun Park, Sehyeong Ryu, Sungjin Jeong, Jihyeon Min, and Youngil Park. 2025. A Study on Multi-Queue-Based Ethernet Data Transmission for Automotive Brake Systems. The Journal of Korean Institute of Communications and Information Sciences, 50, 12, (2025), 1966-1973. DOI: 10.7840/kics.2025.50.12.1966.
KICS Style Changkyun Park, Sehyeong Ryu, Sungjin Jeong, Jihyeon Min, Youngil Park, "A Study on Multi-Queue-Based Ethernet Data Transmission for Automotive Brake Systems," The Journal of Korean Institute of Communications and Information Sciences, vol. 50, no. 12, pp. 1966-1973, 12. 2025. (https://doi.org/10.7840/kics.2025.50.12.1966)
|