IndexFiguresTables |
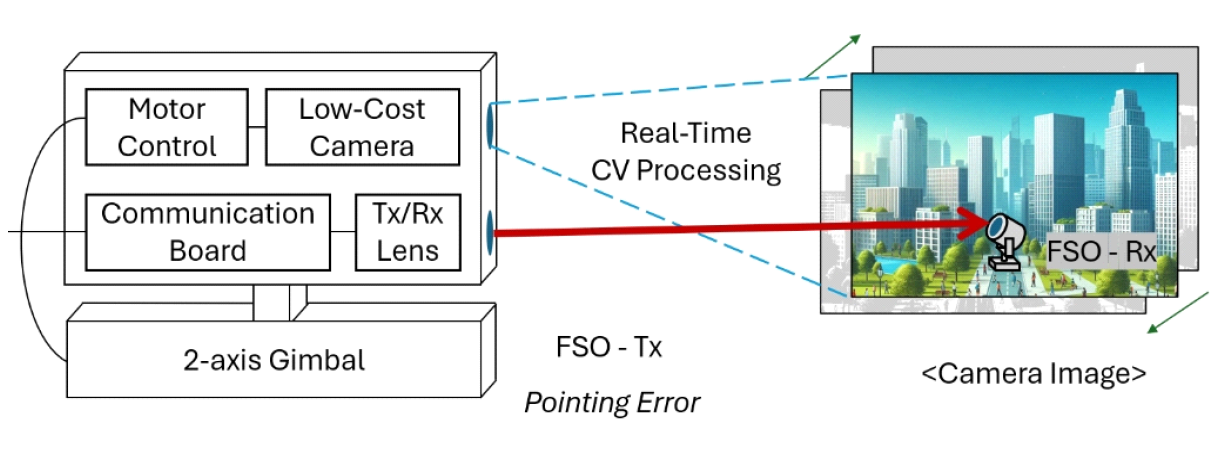
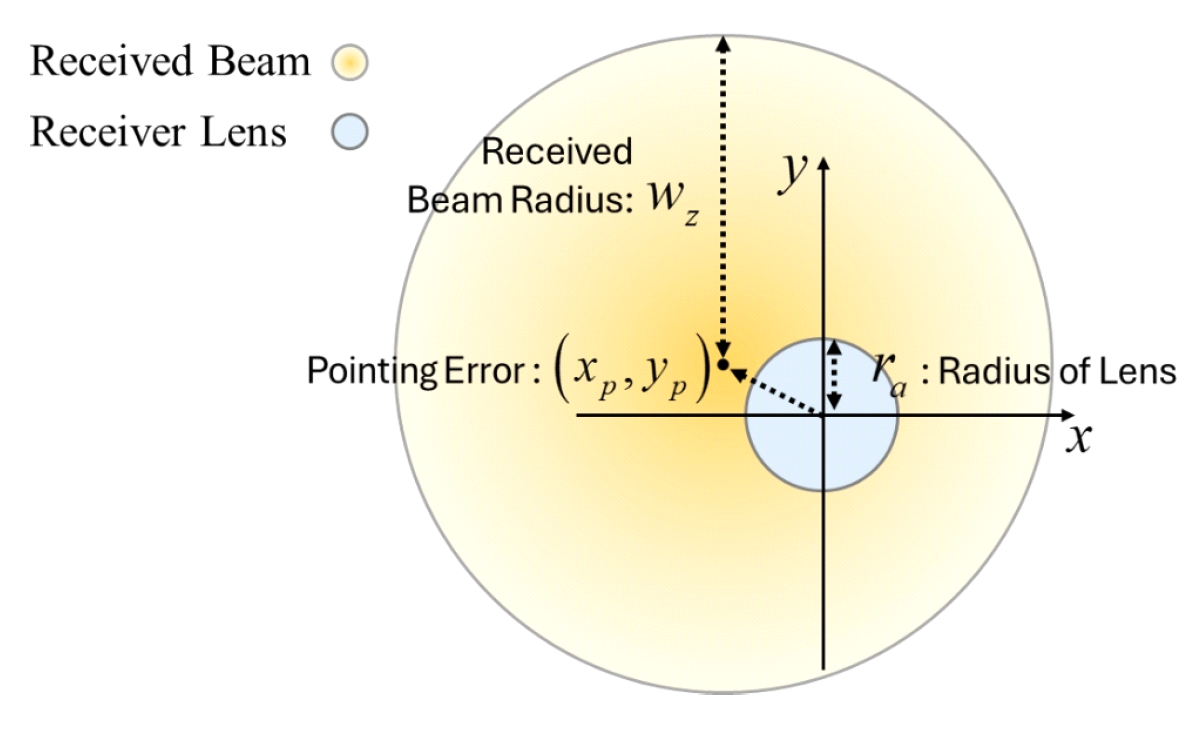
Jong-Min Kim♦, Ki-Hong Park*, Young-Chai Ko°, Mohamed-Slim Alouini*Beam Tracking Method Based on KLT Tracker in Free Space Optical CommunicationAbstract: In this paper, we propose a beam tracking method utilizing a camera in FSO communication to mitigate beam pointing errors between transceiver. The proposed system adopts the KLT tracker which is developed in the field of computer vision to estimate the position of receiver. Using the estimated results, a 2-axis gimbal is controlled to align the beam pointing in real-time. Under ideal motor control conditions, the proposed method achieved an 80% reduction in pointing error along with a 1.47 dB signal-to-noise ratio(SNR) margin, which enables a stable communication link. In addition, considering image processing and motor control latency, it is observed that the proposed method remains valid as long as the coherence time of beam pointing error is slower than the camera frame rate. Keywords: FSO , Beam Tracking , KLT Tracker 김종민♦, 박기홍*, 고영채°, Mohamed-Slim Alouini*무선 광통신 시스템에서 KLT 추적기 기반의 빔 정렬 기법 연구요 약: 본 논문에서는 무선 광통신(FSO, free space optics) 시스템에서 송수신기 간 빔 정렬 오차를 보정하기 위한 카메라 기반의 보정 기법을 제안한다. 제안된 시스템은 카메라 영상을 기반으로 컴퓨터 비전에서 널리 사용되는KLT(Kanade-Lucas Tomasi) 추적기를 활용하여 수신기의 상대 위치를 추정한다. 이를 바탕으로 2축 짐벌의 동작을 제어하여 실시간으로 빔 정렬을 수행한다. 이상적인 모터 제어 상황에서의 실험 결과, 제안하는 기법은 빔 정렬 오차를 최대 80% 이상의 감소시킬 수 있었으며, 신호 대 잡음비 마진은 약 1.47 dB 수준으로 안정적으로 유지할 수 있었다. 또한, 영상 처리와 모터 제어에 일정 수준의 지연이 존재하더라도, 빔 정렬 오차의 시간 상관성이 카메라의 프레임 속도보다 느린 경우에는 제안된 보정 기법이 여전히 효과적으로 작동함을 실험적으로 검증하였다. 본 연구 결과는 고가의 전문 장비 없이도 카메라만으로 기존 CP(coarse pointing) 대비 향상된 정밀도를 보이는 저비용의 무선 광통신 시스템의 구현 가능성을 제안한다. 키워드: 무선 광통신, 빔 정렬, KLT 추적기 Ⅰ. 서 론국제전기통신연합의 한 보고서에 따르면 전 세계 인구의 약 30%는 여전히 인터넷에 연결되지 못하고 있다[1]. 이러한 디지털 격차의 주요 원인 중 하나는 기존의 네트워크 백홀(backhaul) 망 구축에 사용되는 광케이블 기반의 통신 기술에 있다. 광케이블 통신은 광섬유의 광학적 특성을 활용하여 먼 거리까지 낮은 손실로 데이터를 전송할 수 있다는 장점이 있지만, 각 지점에 물리적인 유선 연결이 필요하기 때문에 설치 비용이 높고 유지보수가 어려운 단점이 있다[2]. 이러한 한계를 보완하기 위해 차세대 무선 백홀 기술이 활발히 연구되고 있으며, 그중에서도 무선 광통신(FSO, free space optics)은 유망한 대안으로 주목받고 있다. 무선 광통신은 기존의 광케이블 통신에서 사용되는 광학 장비를 기반으로 1,550 nm 파장의 적외선 빛을 사용하며, 기존 RF(radio frequency) 기반의 무선 통신과 달리 주파수 사용권의 제약을 받지 않는다. 이에 따라 낮은 비용으로 통신 인프라를 구축할 수 있고, 동시에 넓은 대역폭을 활용하여 초고속 통신이 가능하다는 장점이 있다. 따라서 무선 광통신은 무선 백홀 용도로 매우 적합하며, 사막이나 섬, 고산 지대 등 광케이블 설치가 어려운 환경에서도 자유롭게 설치할 수 있다. 최근 연구에 따르면 무선 광통신으로 1.8km 거리까지 약 4Tbps의 속도로 연결한 사례도 보고되었다[4]. 이러한 특성 덕분에 무선 광통신 기술은 기존의 유선광 케이블을 대체할 수 있을 것으로 기대된다. 그러나 이 기술에도 치명적인 한계가 존재한다. 바로 송수신기 간 빔 정렬 오차가 통신 품질에 큰 영향을 미친다는 점이다. 지상 링크에서 이 오차를 유발하는 주된 요인은 건물 흔들림(building sway)과 대기 난류 (atmospheric turbulence)이다. 기존 연구에 따르면[5,6], 각 건물은 자재와 구조에 따라 각기 다른 1차 고유 진동수를 갖는다. 일반적으로 고층 구조물의 1차 진동수는 0.1Hz에서 10Hz 사이에 분포하며, 이는 바람이나 지반 진동이 만드는 외력 주파수 영역과 겹친다. 그 결과 건물은 수백 밀리초에서 수초 주기의 느린 진동 응답을 보이며, 시간 상관성도 수초 수준에 이른다[7]. 특히 그 진폭은 고층의 경우 수십 cm까지 보고되며[8], 이는 빔폭이 매우 작은 무선 광통신에서는 통신이 끊어지기 충분한 수준이다. 반면 대기 난류는 국지적인 온도와 습도 차이로 굴절률이 변해 빔 각도를 미세하게 흔들어 놓으며, 수 밀리초 단위로 매우 빠른 시간 상관성을 가진다[9]. 그러나 그로 인한 각도 변화의 정도는 수십 μrad에 불과해[10], 통신 링크 단절보다는 채널 페이딩(fading)에 가깝다. 최근 연구에 따르면 빔 정렬 과정은 크게 CP(coarse pointing)와 FP(fine pointing) 두 단계로 나뉜다[11]. CP는 넓은 범위에서 대략적인 빔 정렬을 수행하는 단계이다. 주로 카메라나 GPS 등을 활용하여 송수신기 간의 상대적 위치를 계산하고 2축 짐벌(gimbal)을 이용해 광빔의 방향을 조정한다. FP는 좁은 영역 내에서 발생하는 미세한 떨림이나 오차를 정밀하게 보정하는 과정이다. 일반적으로 고속 조정 거울(FSM, fast steering mirror)을 이용한 방향 제어와 4분할 광 검출기(QPD, quadrant photodetector)를 통한 진동 측정 기법이 결합되어 구현된다. QPD와 FSM 기반의 전형적인 빔 정렬 방식은 여러 실험을 통해 안정적이고 우수한 성능이 입증된 바 있다. 그러나 FSM과 같은 고속 액추에이터는 일반적으로 수천 달러에 이르는 고가 장비로, 이에 따른 높은 구축 비용이 단점으로 지적된다. 한편 대기 난류가 아닌 건물 흔들림만을 추적한다면, 이는 상대적으로 더 느린 시간 상관성을 가지므로 일반적인 30-60 fps 수준의 카메라 프레임 속도만으로도 충분히 추적이 가능할 것으로 예상된다. 또한 카메라는 QPD와 달리 넓은 시야각을 가지므로, 국소적인 대기 난류로 인해 미세한 흔들림이 존재하더라도 영상 전체의 평균적 움직임을 파악할 수 있어 건물 흔들림과 같은 전역적 움직임을 인식하는데 적합하다. 건물 흔들림을 보정한 뒤에도 남는 대기 난류의 영향은 적응 광학(AO, adaptive optics) 기술 및 MIMO(multiple input multiple output) 기반 아날로그와 디지털적 기법으로도 추가 보정할 수 있다[12]. 예를 들어, AO는 왜곡된 레이저 빔의 파면을 실시간으로 측정한 뒤 이에 반대되는 위상을 수신 빔에 적용하여 난류 효과를 상쇄한다. 또한 MIMO는 RF 통신에서 사용되는 다이버시티(diversity) 기법을 광 통신에 응용하여 대기 난류로 인한 페이딩을 완화한다. 이러한 배경에서, 본 연구진은 기존 무선 광통신 시스템에서는 이미 카메라가 CP 단계에서 활용되었던 점에 착안하여 저비용 가시광 카메라만으로도 빌딩의 흔들림을 추적해 기존 CP보다 정밀도가 향상된 빔 정렬이 가능하다는 가설을 국내 학술발표회에서 제안한 바 있다[13]. 본 논문에서는 이를 더욱 발전시켜 기존의 고가 장비 없이도 빔 정렬 성능을 확보할 수 있는 기법을 구체적으로 제안하고, 제안된 시스템의 성능을 실험적으로 검증하는 것을 목표로 한다. 카메라만을 이용해 빔 정렬 오차를 보정하기 위해서는 수신기의 위치를 영상을 통해 실시간으로 분석할 수 있어야 한다. 이를 위해서 컴퓨터 비전(CV, computer vision) 분야에서 널리 활용되는 물체 인식 및 추적 기술이 필요하며, 그 중 대표적인 방법으로 KLT(Kanade-Lucas-Tomasi) 추적기를 사용하였다[14]. KLT 추적기는 기준 프레임에서 특이점을 검출한 후, 각 특이점의 광학 흐름(optical flow)을 이용하여 다음 프레임에서의 움직임을 예측하고 추적하는 방식으로 동작한다. 본 연구에서는 그림 1과 같이 KLT 추적기를 활용하여 카메라 영상 속 수신기의 움직임을 추적하고, 이를 기반으로 한 모터 제어를 통해 빔 정렬 오차를 보정하였을 때의 무선 광통신 시스템 통신 성능을 분석하였다. 성능 평가는 빔 정렬 오차 예측 정확도, 수신 신호 대 잡음비(SNR, signal-to-noise ratio), 통신 두절 확률(outage probability)의 측면에서 이루어졌으며, 실제 카메라 영상 처리부터 모터 제어 명령까지의 전달 지연을 고려하여 시스템 전반의 성능 저하 수준도 함께 분석하였다. Ⅱ. 본 론2.1 시스템 모델본 연구에서는 광 세기 복변조(IM/DD, intensity modulation/direct detection)를 가정한다. 송신 빔의 빛 세기는 2차원 정규 분포를 따른다. 그림 2에는 수신 렌즈와 수신된 빔을 도식화하였다. [TeX:] $$r_a, w_z$$은 각각 수신 렌즈의 반지름, 수신 빔의 반지름이다. 수신기에서 수신된 신호 y는 다음과 같이 표현된다.
(1)의 [TeX:] $$h_a$$는 대기 난류로 인한 손실, [TeX:] $$h_p$$는 빔 정렬 오차로 인한 기하학적 손실, [TeX:] $$h_l$$는 경로 감쇠에 의한 손실을 의미한다. 또한, x는 송신 데이터 신호, n은 분산이 [TeX:] $$N_0$$인 AWGN(additive white gaussian noise)이다. 수신기에서의 신호 대 잡음비(SNR, signal-to-noise ratio)는 다음과 같이 정의된다.
(2)의 [TeX:] $$E\left[x^2\right]$$는 전송 신호의 세기를 나타낸다. 2.2 채널 모델본 연구에서는 빔 정렬 오차가 미치는 영향만을 고려해 분석하기 위해서 기하학적 손실을 제외한 나머지 채널 손실값은 [TeX:] $$h_a=h_l=E\left[x^2\right] / N_0=1$$로 정규화하였다. 따라서 시스템의 통신 성능은 오직 기하학적 손실 [TeX:] $$h_p$$에 의해 결정되며, 이는 다음과 같이 정의된다.
(3)[TeX:] $$h_p=\int_{-r_a}^{r_a} \int_{-\sqrt{r_a^2-y^2}}^{\sqrt{r_a^2-y^2}} \frac{2}{\pi w_z} \exp \left(-2 \frac{\left(x-x_p\right)^2+\left(y-y_p\right)^2}{w_z^2}\right) d x d y$$(3)은 [TeX:] $$r_a$$ 반지름의 수신 렌즈에서 획득한 수신 빛의 세기이다. [TeX:] $$w_z \gt 6 r_a$$에서 (3)은 다음과 같이 근사할 수 있다[15].
(4)[TeX:] $$h_p=A_0 \exp \left(-2 \frac{\left(x-x_p\right)^2+\left(y-y_p\right)^2}{w_{z, e q}^2}\right)$$(4)에서, [TeX:] $$A_0=({erf}(v))^2, \quad v=\sqrt{\pi} r_a / \sqrt{2} w_z,$$ [TeX:] $$w_{z, e q}^2=w_z^2 \frac{\sqrt{\pi} {erf}(v)}{\left(2 v \exp \left(-v^2\right)\right)}, \quad {erf}(z)=\frac{2}{\sqrt{\pi}} \int_0^z \exp \left(-x^2\right) d x$$로 정의된다. 또한, [TeX:] $$\left(x_p, y_p\right)$$는 그림 2에 표시된 수신 렌즈와 수신 빔 사이 빔 정렬 오차를 의미한다. [TeX:] $$x_p \text { 와 } y_p$$는 각각 [TeX:] $$N\left(\mu_{x_p}, \sigma_{x_p}^2\right) \text { 와 } N\left(\mu_{y_p}, \sigma_{y_p}^2\right)$$의 정규 분포를 따르는 확률 변수이다. 2.3 KLT 추적기 기반 빔 정렬 기법카메라가 장착된 무선 광통신 시스템에서 카메라로부터 획득된 이미지는 매 프레임 처리되어 수신기의 위치를 추적한다. 카메라 이미지 영상 처리를 위해 컴퓨터 비전 분야에서 널리 사용되는 KLT 추적기를 적용한다. KLT 추적기는 크게 특이점 검출 과정과 광학 흐름 기반 추적 과정 두 가지로 나누어 수행된다. 2.3.1 특이점 검출 과정 사용되는 카메라의 해상도가 N × N 픽셀 크기라고 했을 때, 특정 시간 t에서 (x,y) 위치의 픽셀의 빛의 세기를 I(x,y,t)라고 정의할 수 있다. 이때, 시간 t에서 x 또는 y축으로의 빛의 세기 변위 행렬 [TeX:] $$I_x(x, y, t) \text { 와 } I_y(x, y, t)$$는 다음과 같이 정의된다.
(5)와 (6)를 이용하여 특정 (x,y) 픽셀 위치를 중심으로 n × n 픽셀 크기의 창 영역을 설정하고, (x,y)에서의 구조 텐서 행렬(structure tensor matrix)을 다음과 같이 정의할 수 있다.
(7)[TeX:] $$M_{(x, y)}=\left[\begin{array}{cc} \sum_{j=1}^{n^2} I_{x, j}^2 & \sum_{j=1}^n \sum_{k=1}^n I_{x, j}^2 I_{y, k}^2 \\ \sum_{j=1}^n \sum_{k=1}^n I_{x, j}^2 I_{y, k}^2 & \sum_{j=1}^{n^2} I_{y, j}^2 \end{array}\right]$$(7)에서 행렬 M의 고유값(eigenvalue) 2개를 계산하여 최솟값을 얻는다. 이때, (x,y) 픽셀 위치에서 두 고유값의 최솟값이 특정 기준치 이상의 값을 가지면 해당 픽셀을 특이점으로 선정한다. 만약 [TeX:] $$M_{(x, y)}$$의 고유값을 [TeX:] $${eig}\left\{M_{(x, y)}\right\}$$이라고 정의하면, 본 특이점 검출 과정을 다음과 같이 수식화할 수 있다[16].
(8)[TeX:] $$\underset{(x, y)}{\operatorname{argmin}}\left\{{eig}\left\{M_{(x, y)}\right\}\right\}\gt K_{t h}$$(7)의 고유값이 가지는 의미는 (x,y) 픽셀의 x축 방향 또는 y축 방향의 변화율이다. 따라서 고유값 2개 중 한 값이 상대적으로 클 경우, 이는 이미지에서 보통 물체 가장자리를 의미한다. 만약, 두 고유값이 모두 상대적으로 높은 값을 가지는 경우에는 이미지상에서 특정 물체의 꼭짓점에 해당할 확률이 높다. 따라서 (8)과 같이 두 고유값의 최솟값이 기준치를 넘기는 픽셀들을 기준으로 특이점을 선별한다. 이러한 특이점 검출 과정은 전체적인 계산량을 감소시키고 동적 변화가 적은 단색의 배경을 배제함으로써 영상 속 물체의 움직임의 추적 성능을 개선하는 데 도움을 준다. 2.3.2 LK(Lucas-Kanade) 광학 흐름 기반 추적 특이점 검출을 통해 선별된 특이점들이 선별되면, 매 프레임마다 특이점의 움직임을 광학 흐름 분석을 기반으로 추적한다. 광학 흐름은 연속된 두 프레임 사이 특이점의 이동속도를 x축, y축에 대하여 벡터 형식으로 나타낸 것이다. 따라서, 광학 흐름의 단위는 초당 이동 픽셀 수(pixels/sec)이다. 광학 흐름을 계산하기 위해서는 LK 기법이 사용된다. LK 기법은 연속된 두 프레임 사이에 특이점의 밝기는 변하지 않는다는 가정을 이용한다. 두 프레임 사이의 시간차를 Δt라고 하고, 광학 흐름 벡터를 [TeX:] $$\left(v_x, v_y\right)$$라고 할 때, 시간 t에서 특이점 (x,y)이 다음 프레임 t+Δt시간에서는 [TeX:] $$\left(x+v_x \Delta t, y+v_y \Delta t\right)$$으로 이동한다. 이와 함께, 이동 전과 후의 밝기는 같다는 가정은 수식적으로 다음과 같이 표현할 수 있다.
두 프레임 사이 시간 간격이 매우 짧다고 가정하면 테일러 1차 근사를 이용해 (9)를 다음과 같이 정리할 수 있다.
(10)[TeX:] $$\begin{aligned} I(x, y, t)= & I(x, y, t)+I_x v_x \Delta t+I_y v_y \Delta t+I_t \Delta t \\ & \Leftrightarrow I_x v_x+I_u v_u=-I_t \end{aligned}$$(10)에서 [TeX:] $$I_t$$는 시간에 따른 밝기의 변화율로 다음과 같이 정의된다.
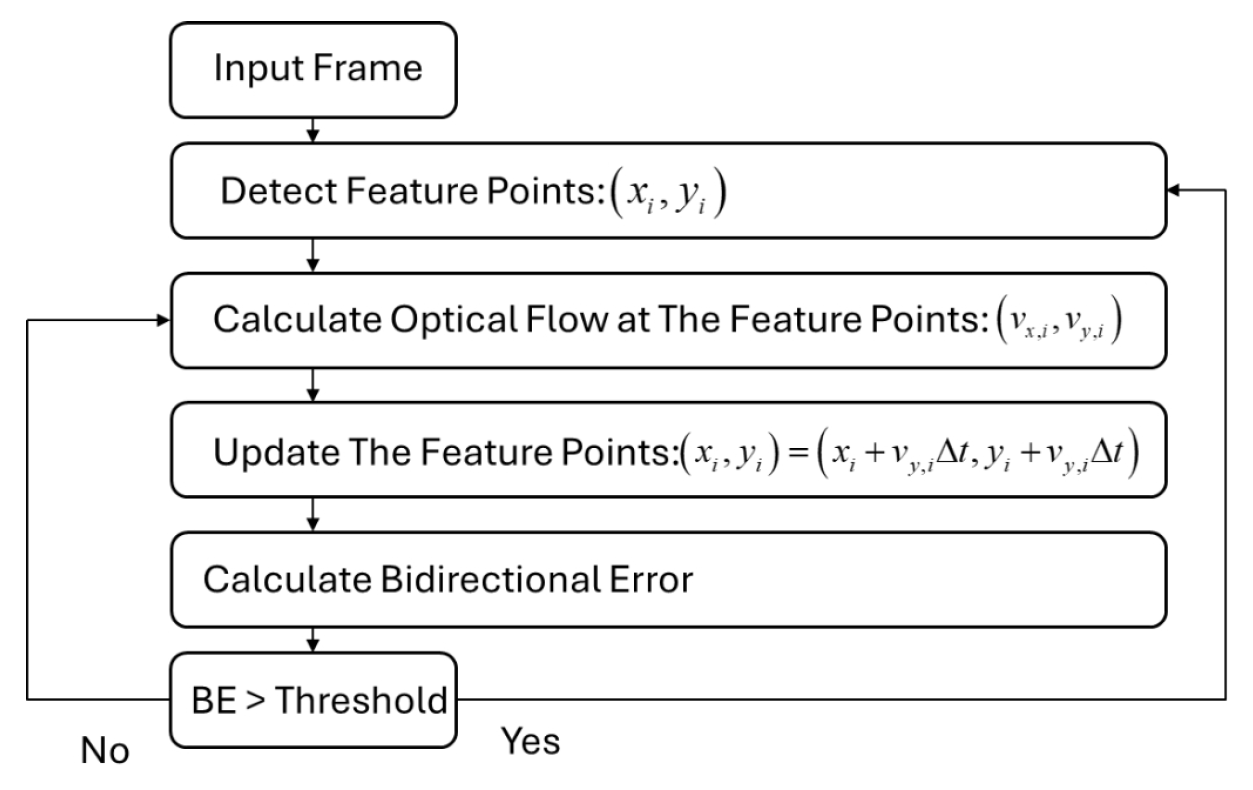
(10)의 방정식을 이용해 광학 흐름 벡터 [TeX:] $$\left(v_x, v_y\right)$$를 얻기 위해서 2개 이상의 방정식이 필요하다. 따라서 (x,y) 픽셀을 중심으로 n × n 크기의 창 영역을 설정하고, 영역 내의 픽셀들에 대하여 (10) 기반의 연립 방정식을 세운다. 이때, 변수는 2개, 방정식은 n2개이므로 선형 회귀 (linear regression) 기법을 이용해 [TeX:] $$\left(v_x, v_y\right)$$를 최종 결정한다. 계산된 광학 흐름 벡터를 기반으로 다음 프레임에서 특이점의 이동 위치를 예측하고, 특이점의 좌표를 새로운 값으로 업데이트한다. 이처럼 KLT 추적기는 특이점을 검출한 뒤 그 점들의 이동만을 지속해서 추적하기 때문에 영상의 해상도가 높아져도 요구되는 계산 복잡도는 상대적으로 낮아 실시간 추적 상황에 적합하다. 2.3.3 양방향 오차 검증 과정 광학 흐름 기반의 특이점 다음 위치 예측이 완료되면, 예측의 정확도를 판단하기 위하여 양방향 오차 검증이 진행된다. 양방향 오차 검증에서는 t+Δt에서 예측된 특이점의 위치에서 다시 시간 t로의 역방향 광학 흐름 예측을 진행한다. 역방향 예측을 통해 예측된 좌표를 [TeX:] $$\left(x^{\prime}, y^{\prime}\right)$$이라고 할 때, 이동 전 특이점 좌표 (x,y)와 [TeX:] $$\left(x^{\prime}, y^{\prime}\right)$$의 거리 차이를 계산한다. 해당 오차가 특정 기준 값 이상이 되었을 때 광학 흐름 기반 예측값의 신뢰도가 낮다고 판단하고 특이점 검출 과정을 다시 진행한다. 그림 3에는 KLT 추적기의 전체 흐름도를 도식화하였다. Ⅲ. 실 험3.1 가상 실험 조건 설계그림 4의 왼쪽 이미지와 같이 약 800 m 거리에 설치된 약2.4 m 지름의 기둥 구조물을 본 실험을 위한 추적 목표 대상으로 설정한다. 기둥의 상단 중심에는 무선 광통신을 위한 수신 렌즈가 장착되어 있다고 가정한다. 수신 렌즈의 반지름은 [TeX:] $$r_a=10 \mathrm{~cm}$$으로, 수신기에 수신된 레이저 빔의 반지름은 [TeX:] $$w_z=100 \mathrm{~cm}$$으로 설정됐다[15]. 빔 정렬 오차가 존재하는 표본 영상을 생성하기 위하여 그림 4의 오른쪽 이미지와 같이 해상도는 533 × 533 픽셀 크기의 13 배율 이미지를 사용한다. 따라서 1 픽셀은 15 cm × 15 cm를 의미한다. 영상의 총길이는 900 프레임이며, 프레임 속도는 30 fps으로 전체 재생 시간은 30초에 해당한다. 이는 전송 신호의 샘플링 속도가 1 GHz일 경우 [TeX:] $$3 \times 10^7$$개의 표본 수에 대응된다. 본 연구에서 빔 정렬 오차 [TeX:] $$\left(x_p, y_p\right)$$는 시간에 따른 상관관계가 존재하는 가우시안(Gaussian) 프로세스로 설정하였다. 이때, [TeX:] $$\left(x_p, y_p\right)$$의 표준편차는 [TeX:] $$\sigma_{x_p}=\sigma_{y_p}=\sigma_p=30 \mathrm{~cm},$$ 픽셀 기준으로 2 픽셀로 설정하였다. 이는 높이 201 m의 고층 건물이 40 mph의 바람을 받을 때 나타나는 흔들림 크기와 유사하므로 상대적으로 강한 진동 범주에 속한다[8]. 두 시간 [TeX:] $$t_i \text { 와 } t_j$$ 사이 상관관계의 커널(kernel) 함수는 다음과 같이 정의한다[17].
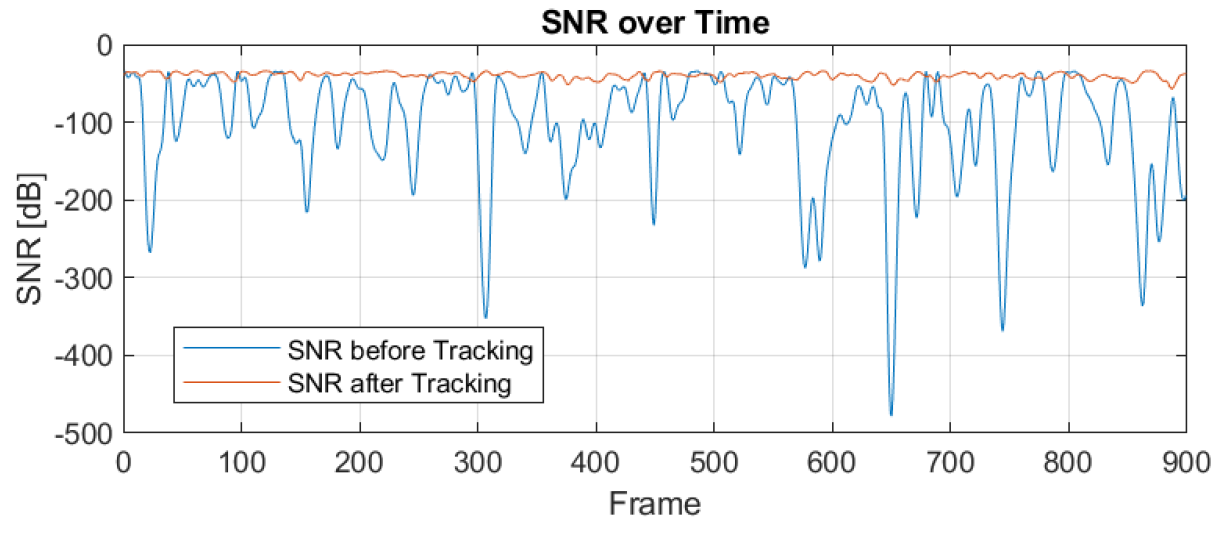
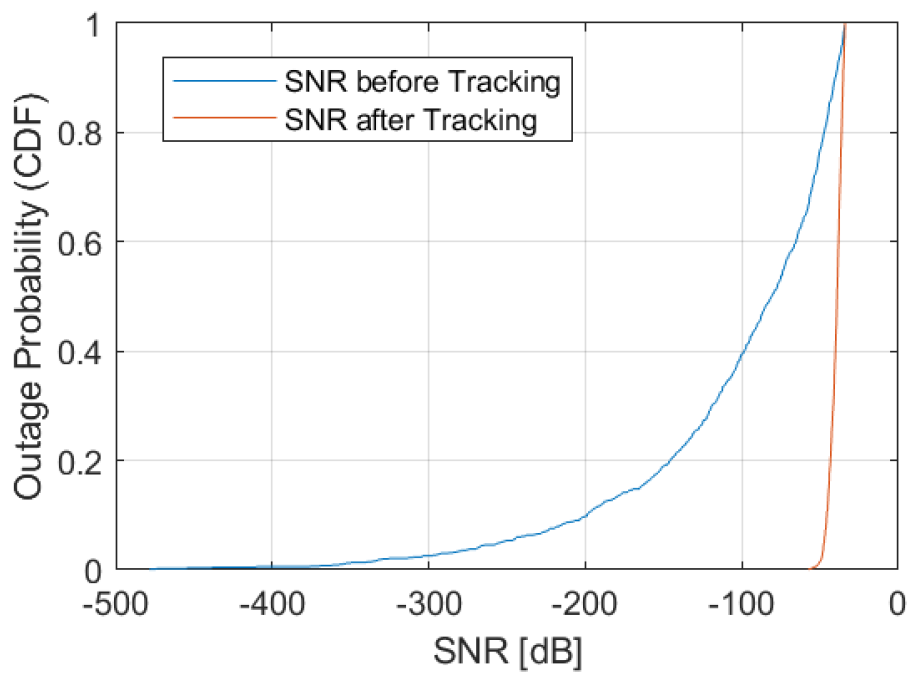
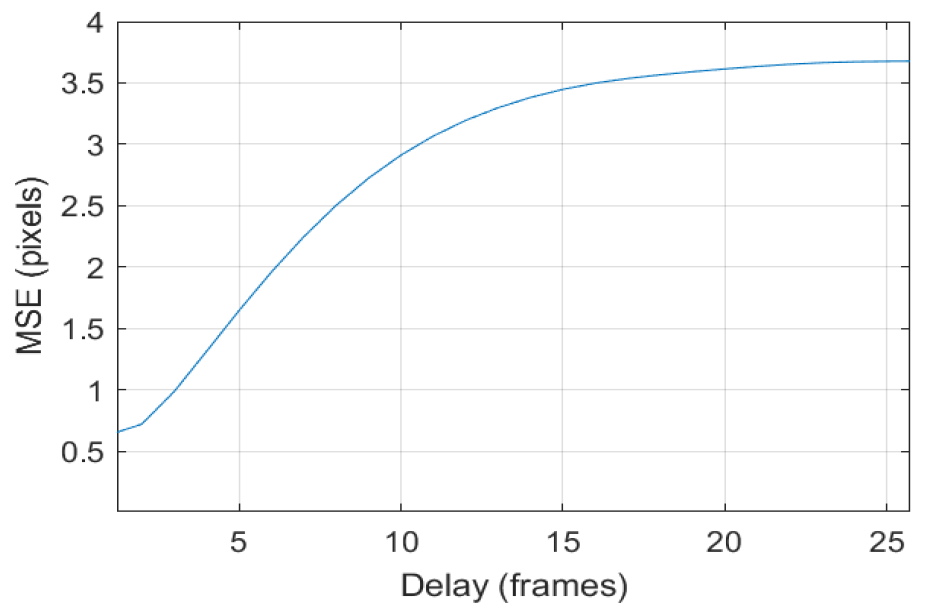
이때 상관 정도를 나타내는 변수 l은 6프레임으로 설정하였다. 6 프레임은 시간상 200 ms에 해당하므로 건물 흔들림 주기가 일반적으로 수백 밀리초에서 수초의 범위임을 고려할 때 비교적 빠른 건물 흔들림에 속한다[6]. 현실적인 영상 환경을 재현하기 위해 MATLAB 내장 함수인 “imnoise”를 사용하여 매 프레임마다 임의의 잡음을 추가하였다. 본 실험에서는 KLT 추적기를 기반으로 영상 속의 수신기의 위치를 추정하고, 해당 방향으로 빔을 조준하기 위한 2축 짐벌 모터에 제어 명령을 전달하는 동작 과정을 가정하였다. 3.2 실험 결과3.2.1 이상적인 모터 동작 제어 결과 그림 5와 그림 6은 표본 영상 제작 과정에서 생성된 x축과 y축 방향의 빔 정렬 오차와 KLT 추적기 기반의 보정 결과를 시간에 따라 나타낸 것이다. 이때 모터의 동작 제어에는 지연과 오차가 전혀 없는 이상적인 상황을 가정하였다. 이는 KLT 기반 빔 추적기가 달성할 수 있는 최적의 추적 성능을 평가하기 위함이다. 그 결과, 보정 전 표준편차가 2 픽셀이었던 빔 정렬 오차는 보정 후 x축 기준 0.39 픽셀, y축 기준 0.34 픽셀 수준으로 약 80% 이상 감소하였다. 그림(Fig.) 5. 시간에 따른 x축 방향의 빔 정렬 오차와 빔 추적 결과 (Pointing error on x-axis over time and stabilization result) 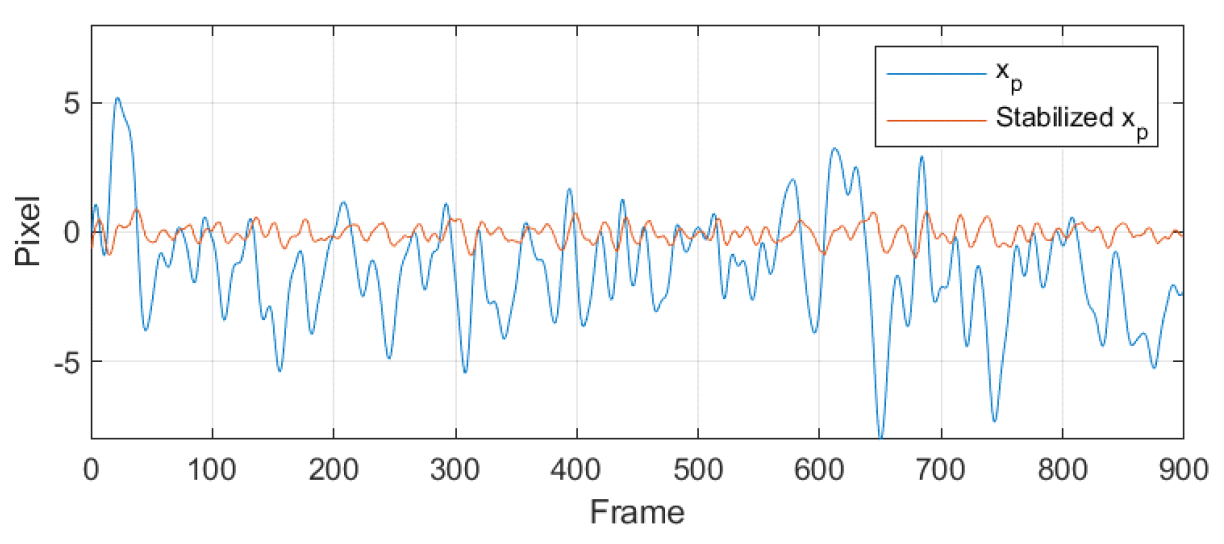 그림(Fig.) 6. 시간에 따른 y축 방향의 빔 정렬 오차와 빔 추적 결과 (Pointing error on y-axis over time and stabilization resulto) 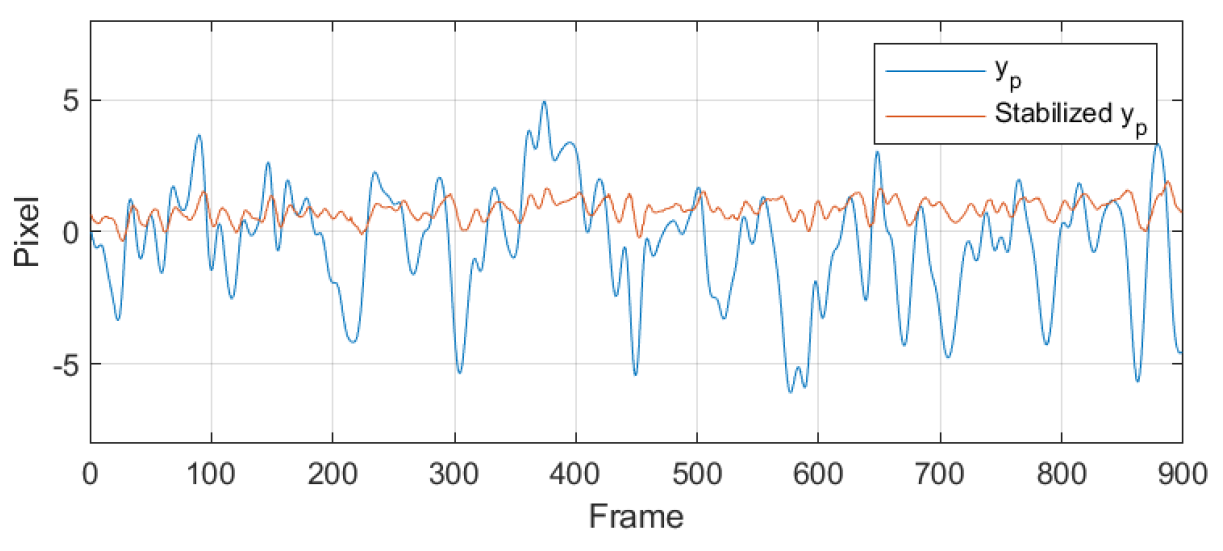 그림 7은 그림 5와 그림 6의 결과를 바탕으로, (2)를 이용하여 시간에 따른 신호 대 잡음비 변화를 계산한 결과이다. 보정 전에는 신호 대 잡음비 마진이 약 500 dB로 통신이 불가능한 수준이었으나, 보정 후에는 약 1.47 dB의 마진으로 감소되었다. 이는 KLT 추적기 기반의 빔 정렬 오차 보정 기법이 안정적으로 동작함을 보여준다. 또한, 그림 8은 그림 7의 보정 전후 신호 대 잡음비 결과를 누적확률분포 형태로 표현한 것이다. 누적확률분포 분석을 통해 통신 두절 확률을 확인할 수 있으며, 해당 결과로부터 KLT 추적기 기반의 빔 정렬 보정 기법이 통신 두절 확률을 크게 감소시키는 효과가 있음을 확인할 수 있다. 3.2.2 영상 처리 시간 및 모터 동작 지연을 고려한 결과 KLT 추적기의 빔 추적 결과를 기반으로 모터의 동작을 제어하기까지의 발생할 수 있는 지연 요인에는 크게 영상 처리 시간과 모터 동작 지연으로 구분된다. 먼저 영상 처리 시간은 주로 하드웨어의 성능에 좌우된다. 한 선행 연구에 따르면, KLT 추적기를 FPGA에 구현해 640 × 480 픽셀 해상도와 60 fps 입력을 처리한 결과 한 프레임당 평균 16.7 ms 처리속도를 기록했다[18]. 이를 참고하면, 본 연구에서 가정한 30 fps의 533 × 533 픽셀 조건에서는 영상 처리 지연이 1프레임(약 33ms)보다 짧다고 볼 수 있다. 또한 모터 제어 지연은 크게 세 가지 요인으로 결정된다. 첫 번째는 명령 주기로, 대표적인 저가 서보 모터인 SG90은 20 ms의 명령 주기를 가진다. 두 번째는 구동 속도로, SG90 모터의 경우 1도를 움직이는데 약 1.6ms가 소요된다. 이는 일반적인 건물 흔들림보다 충분히 빠른 속도이다. 세번째는 관성과 하중의 영향으로, 이에 따른 가속과 감속 및 정지 시간을 고려해 예상 지연의 약 3배 여유 마진을 잡으면 평균 모터 동작 지연은 약 100 ms(약 3프레임) 수준으로 추정된다. 따라서 본 시뮬레이션에서는 영상 처리 시간과 모터 지연을 종합적으로 고려하여 총 0에서 25프레임까지 지연이 발생할 수 있다고 가정한다. 이때, 추적 성능은 평균 제곱 오차(MSE, mean squared error)로 평가되며 다음과 같이 정의된다.
(13)[TeX:] $$M S E=E\left[\left(x_p-x_{p, e s t}\right)_p^2+\left(y_p-y_{p, e s t}\right)^2\right]$$(13)의 [TeX:] $$x_{p, e s t} \text { 와 } y_{p, e s t}$$는 보정 후의 x축과 y축 방향의 빔 정렬 오차를 나타낸다. 이를 토대로 그림 9에서는 모터 동작이 완료되기까지 지연이 존재할 때의 빔 정렬 오차 보정 성능을 나타내었다. 실험 결과, 지연 시간이 빔 정렬 오차의 시간 상관 계수 6 프레임 이하일 때는 평균 제곱 오차가 약 1.4 픽셀 이하의 개선된 성능을 보였다. 그러나, 시간 상관 계수 6 프레임 이상의 지연이 발생하면 오히려 빔 정렬 오차가 악화되는 현상이 나타났다. 따라서, 본 연구에서 제안하는 KLT 추적기 기반의 빔 추적 기법은 시스템에서 주어진 빔 정렬 오차의 시간 상관성 크기에 따라 성능이 좌우됨을 실험적으로 확인하였다. Ⅳ. 한계점 및 미래 도전 기술 과제본 논문에서 제안된 컴퓨터 비전 기반의 빔 정렬 기법을 실제 시스템에 적용하려면 다음 사항을 추가로 검토해야 한다. 우선, 제안된 기법은 복잡한 환경에서 추적에 한계가 있다. KLT 추적기는 배경이 단순하고 독립적으로 움직이는 물체가 없는 환경에서 가장 안정적이다. 그러나 움직이는 피사체나 복잡한 배경이 있는 상황에서는 특이점이 소실될 가능성이 높아 정확한 추적이 어려울 수 있다. 향후에는 딥러닝 기반 객체 검출 및 추적 기법을 접목하여 수신기 영역을 정확히 식별하고, 해당 영역만 선택적으로 추적함으로써 다양한 환경에서도 안정적으로 성능을 확보할 수 있도록 발전시켜야 할 것이다. 또한, 영상 해상도와 광학계 조건에 따른 성능 변화를 고려해야 한다. 본 연구는 533 × 533 픽셀의 저해상도에서도 충분한 성능을 확인하였으나, 수 km 이상의 장거리 무선 광통신 링크에서는 수신기가 영상 내에서 매우 작게 나타날 수 있다. 이 경우, 고배율 망원 렌즈를사용해 각 화소당 시야각을 추가로 축소해야한다. 이는 시스템 부피와 무게의 증가로 이어진다. 따라서 본 기법은 시야가 충분히 확보된 단거리의 환경에서 적절한 배율 조절을 통해 적용하는 것이 바람직하다. 한편, 야간 또는 안개가 있는 저조도 환경이라면, 가시광 대신 적외선 카메라를 사용해 운용이 가능할 것으로 기대된다. 모터 제어 및 제어공학적 제약도 중요한 고려 요소이다. 영상 추적 결과가 정확하더라도, 모터가 목표 각도로 수렴하기까지는 명령 주기, 구동 속도, 관성에 따른 지연이 발생한다. 일반적으로 비례-적분-미분(PID) 제어기를 활용한 폐루프 제어 방식이 사용되며, 이는 건물 흔들림처럼 느린 오차에 대해서는 충분한 성능을 보인다. 하지만 여전히 모터의 잡음이나 비선형성 등으로 인해 추가 성능 저하가 발생할 수 있으며, 이를 보완하기 위해 고급 제어 기법의 도입과 시스템 최적화가 필요하다. 특히 본 연구의 시뮬레이션에서는 이러한 실제 제어공학적 특성을 반영하지 못했기 때문에 현실 적용 시 추가적인 성능 저하가 불가피할 것으로 예상된다. 끝으로, 전체 시스템을 FPGA 수준의 하드웨어로 구현할 경우, 영상 처리, 통신, 제어 등 각 단계에서 잡음이 추가로 발생할 수 있다. 이때 전체 시스템 지연이 건물 흔들림의 시간 상관성 범위 내에 머물러야만 원하는 추적 성능을 유지할 수 있다. 따라서, 후속 연구에서는 이러한 하드웨어적 구현 요소까지 통합적으로 고려해 과제를 해결한다면, 제안된 빔 정렬 기법은 복잡한 실외 환경과 야간, 장거리 무선 광통신 링크 등 다양한 현실 시나리오에서도 실용적으로 활용될 수 있을 것이다. Ⅴ. 결 론본 논문에서는 카메라만을 이용하여 무선 광통신 시스템의 빔 정렬 오차를 보정하는 기법을 제안하였다. 영상 처리를 위해 컴퓨터 비전 분야에서 널리 사용되는 KLT 추적기를 도입하였으며, 이를 기반으로 한 빔 정렬 오차 보정 실험을 수행하였다. 실험 결과, 이상적인 모터 제어 환경하에서 빔 정렬 오차를 최대 80%까지 감소시킬 수 있었고, 이를 통해 카메라만을 이용한 시스템에서도 안정적인 통신 성능을 충분히 확보할 수 있음을 입증하였다. 제안된 기법은 기존의 CP 정밀도를 더욱 향상시킬 수 있는 저비용 무선 광통신 시스템의 구현 가능성을 보여준다. 특히, 빔 정렬 오차의 시간 상관성이 카메라의 프레임 속도보다 느린 환경에서는 제안한 기법이 효과적으로 적용될 수 있을 것으로 기대된다. BiographyBiographyBiographyBiographyMohamed-Slim Alouini1995년 2월 : Georgia Institute of Technology, 전자공학 석사 1998년 2월 : California Institute of Technology, 전자공학 박사 1998년~2004년 : Professor, University of Minnesota, USA 2004년~2009년 : Professor, Texas A&M University at Qatar, Qatar 2009년~현재 : Professor, KAUST, Saudi Arabia <관심분야> 통신공학, 무선통신 [ORCID:0000-0003-4827-1793] References
|
StatisticsCite this articleIEEE StyleJ. Kim, K. Park, Y. Ko, M. Alouini, "Beam Tracking Method Based on KLT Tracker in Free Space Optical Communication," The Journal of Korean Institute of Communications and Information Sciences, vol. 51, no. 1, pp. 93-101, 2026. DOI: 10.7840/kics.2026.51.1.93.
ACM Style Jong-Min Kim, Ki-Hong Park, Young-Chai Ko, and Mohamed-Slim Alouini. 2026. Beam Tracking Method Based on KLT Tracker in Free Space Optical Communication. The Journal of Korean Institute of Communications and Information Sciences, 51, 1, (2026), 93-101. DOI: 10.7840/kics.2026.51.1.93.
KICS Style Jong-Min Kim, Ki-Hong Park, Young-Chai Ko, Mohamed-Slim Alouini, "Beam Tracking Method Based on KLT Tracker in Free Space Optical Communication," The Journal of Korean Institute of Communications and Information Sciences, vol. 51, no. 1, pp. 93-101, 1. 2026. (https://doi.org/10.7840/kics.2026.51.1.93)
|