IndexFiguresTables |
Kyou-Min Shim♦, Young-Bae Ko°Zone-Focused Differential Evolution Algorithm for Enhancing Real-time UAV Attitude Control PerformanceAbstract: This paper proposes a novel differential Evolution algorithm, Zone-Focused Differential Evolution (ZFDE), to enhance the attitude control performance of Unmanned Aerial Vehicles (UAVs) by efficiently optimizing the gains (Kp, Ki, Kd) of PID controllers. In real-time control systems such as UAVs, computational efficiency and fast convergence are of paramount importance. However, the conventional Differential Evolution (DE) algorithm, which performs operations over the entire population, can lead to high computational costs and low search concentration. To address these issues, the proposed ZFDE generates a large initial population and then filters out only the top N of individuals based on cost values to form a fixed search group for all subsequent DE operations. This approach enhances search focus while reducing redundant computation, thereby providing a more suitable optimization structure for realtime UAV PID tuning. Simulation experiments conducted in MATLABdemonstrate that the proposed ZFDE algorithm outperforms conventional DE in terms of stable convergence to the best cost and reduced computational load. These results suggest that ZFDE is a promising optimization strategy for real-time control environments such as UAV systems. Keywords: UAV , Real-time PID controller , Differential Evolution , Optimization 심규민♦, 고영배°실시간 UAV 자세 제어 성능 향상을 위한 Zone-Focused Differential Evolution 알고리즘요 약: 본 논문에서는 무인항공기(Unmanned Aerial Vehicle, UAV)의 자세 제어 성능을 향상시키기 위해 PID 제어기의 게인(Kp, Ki, Kd)을 효율적으로 최적화할 수 있는 새로운 진화 알고리즘인 Zone-Focused Differential Evolution(ZFDE)을 제안한다. UAV와 같은 실시간 제어 시스템에서는 연산 효율성과 빠른 수렴이 매우 중요하므로, 기존 DE 알고리즘처럼 전체 개체군을 대상으로 연산을 수행하는 방식은 계산 비용 측면에서 비효율적일 수있다. 본 연구에서는 이러한 문제를 해결하고자, 초기 단계에서 대규모 개체군을 생성한 후 비용 기준 상위 N개의개체만을 선별하여 이후의 모든 DE 연산을 수행하는 전략을 도입하였다. 이를 통해 탐색의 집중도를 높이고 불필요한 연산을 줄임으로써, 실시간 UAV PID 제어 최적화 문제에 보다 적합한 알고리즘 구조를 구현하였다. MATLAB 기반의 시뮬레이션 실험을 통해 제안된 ZFDE 알고리즘을 기존 DE와 비교한 결과, 제안 방식은 최적비용의 안정적인 수렴, 감소된 연산량 측면에서 우수한 성능을 보였다. 이는 본 알고리즘이 UAV와 같은 실시간제어 환경에 효과적으로 적용될 수 있는 가능성을 시사한다. 키워드: UAV, 실시간 PID 제어기, 차등 진화, 최적화 Ⅰ. 서 론UAV(Unmanned Aerial Vehicle, 무인항공기)는 현대 공학 및 산업 전반에서 활용도가 빠르게 확대되고 있으며, 이러한 UAV의 안정적 비행을 위한 자세 제어 기술은 핵심적인 연구 주제로 자리 잡고 있다[1]. 특히, PID(Proportional-Integral-Derivative) 제어기는 구조가 단순하면서도 제어 성능이 우수하여 UAV의 자세 제어에 널리 적용되고 있으나, 그 제어 성능은 게인([TeX:] $$K_p, K_i, K_d$$)의 조정에 민감하게 반응한다[2, 3]. 이 때문에 다양한 PID 자동 튜닝 및 최적화 기법이 활발히 연구되고 있다. 특히, 메타 휴리스틱(Meta-Heuristic) 기법 중에서 DE(Differential Evolution, 차등 진화)는 비교적 구현이 간단하고 수렴 성능이 뛰어난 장점을 가진 반면, 모든 개체군에 대하여 반복적인 연산을 수행하므로 실시간 UAV 자세 제어 문제 해결에 있어서는 계산 부담 및 연산 효율성 측면에서 한계가 존재한다. 본 연구에서는 이러한 DE 기반 UAV 실시간 제어의 연산 비효율 문제를 극복하기 위하여 비용 함수 기준 상위 N개의 개체만을 선별하여 진화 연산에 집중하는 ZFDE(Zone-Focused Differential Evolution) 알고리즘을 제안하였다. 본 논문은 다음과 같이 구성된다. 2장에서는 DE 및 관련 메타 휴리스틱 기법들의 주요 특성과 기존 UAV PID 최적화 적용 사례를 정리하고, 특히 기존 DE 기반 실시간 UAV PID 제어기의 동작 원리에 대해 설명한다. 3장에서는 제안하는 ZFDE 알고리즘의 구조와 핵심 전략을 상세히 기술하고, 4장에서는 MATLAB 기반 시뮬레이션 실험 설계 및 조건 설명, 다양한 지표를 통한 성능 비교 분석 결과를 설명한다. 끝으로 5장에서 본 연구의 결론을 도출하고 향후 연구 방향을 제안한다. Ⅱ. 연구배경 및 동기2.1 기존 연구 동향 분석UAV PID 제어기 최적화를 위한 연구는 다양한 메타 휴리스틱 알고리즘을 기반으로 진행되어 왔다. 대표적으로 Genetic Algorithm(GA), Particle Swarm Optimization(PSO) 등이 있으며, 이들은 각각 자연 선택, 군집 기반 지능 등을 모사하여 전역 탐색 능력을 갖추어 PID 제어기를 최적화하고자 하였다. 먼저, GA는 유전자 교차(Crossover) 및 변이(Mutation) 연산을 기반으로 개체를 진화시키는 방식이며, 이를 UAV PID 게인 튜닝에 적용함으로써 응답 특성과 안정성을 향상시킨 연구가 진행되었다[4]. PSO는 입자들이 최적해를 향해 탐색하는 방식으로 작동하며, 계산 속도가 빠르고 수렴 특성이 우수하다는 장점이 있다. 즉, PSO는 단순한 구조와 실시간성, 빠른 수렴을 바탕으로 UAV 제어 등 실시간 응용에 자주 활용되며, 이를 더욱 최적화하기 위하여 입자 다양성 유지 및 지역 최적 수렴 회피를 위한 다양한 개선형 PSO가 제안되었다[5]. 이러한 메타 휴리스틱 알고리즘 중에서도 DE는 높은 전역 탐색 능력과 빠른 수렴 특성, 구현의 단순성, 그리고 강건한 최적화 성능으로 주목받고 있다. DE는 비선형적이며 미분 불가능한 목적 함수에서도 효과적으로 작동하는 것으로 알려져 있다[6]. 이에 따라 실용적이고 확장 가능한 UAV PID 제어기 자동 튜닝 기법에 대한 요구가 제기되고 있으며, DE 기반 접근법에 대한 많은 연구가 이루어지고 있다. 다만, UAV와 같은 복잡한 동적 시스템에 적용할 때 다음과 같은 한계가 존재하는 것도 사실이다[7]. 첫째, DE는 초기 개체 분포가 탐색 공간을 충분히 커버하지 못하면 지역 최적해(Local Optimum)에 빠질 가능성이 크다[8]. 이는 탐색이 특정 영역에 집중될 경우 전역 최적해를 찾지 못하는 문제로 이어질 수 있다. 둘째, 수렴 속도가 일정하지 않으며 반복이 진행됨에 따라 탐색 성능이 저하되는 현상이 발생할 수 있다[9]. 특히 실시간 제어 환경에서는 이러한 수렴 지연이 큰 제약이 될 수 있다. 셋째, 계산량의 측면에서도 DE는 모든 개체에 대해 반복적으로 비용 함수(Cost Function)를 평가하기 때문에, 개체군 크기나 반복 횟수가 증가할수록 연산량이 급격히 증가하여 실시간 UAV 제어 시스템에는 적용이 어렵다는 단점이 있다. 이러한 문제를 해결하기 위한 방법으로 Good Point Set(GPS) 기반의 초기화 방법이나 Random Opposition-Based Learning(ROBL) 등이 있는데 이들은 초기 분포의 균등성이나 탐색 다양성 확보 측면에서 효과를 보인 바 있다[7]. 그러나 이러한 방식들은 주로 초기화 단계에서만 탐색 공간을 넓히거나 다양성을 부여하는 한계가 있으며, 탐색이 시작된 이후에는 전체 개체군을 반복적으로 활용하기 때문에 연산량 감소나 실시간 제어에 최적화된 구조를 갖추지 못한다는 단점이 있다. 그 외에도 DE 성능을 개선하기 위한 다양한 변형 알고리즘들이 제안되었다. 대표적으로 JADE(Adaptive Differential Evolution with Optional External Archive)[10]는 각 세대에서 성공적인 탐색 결과를 바탕으로 변이율과 교차율을 자율적으로 조정하는 방식으로, 매개변수 튜닝의 부담을 줄이면서도 탐색 성능을 향상시켰다. 특히 JADE는 외부 아카이브를 통해 과거 세대의 우수한 해(solution)를 보존하고, 이를 변이 연산에 활용함으로써 탐색 다양성 유지와 수렴 속도 간의 균형을 효과적으로 달성하는 구조를 갖는다 . 또한, SHADE(Success-History Based Adaptive DE)[11] 알고리즘은 이전 세대에서 성공한 파라미터 조합의 이력을 통계적으로 축적하고 이를 기반으로 변이와 교차 연산의 확률 분포를 동적으로 조절한다. 이는 특정 문제에 국한되지 않고 다양한 복잡도 및 차원의 최적화 문제에 대해 강건한 성능을 발휘하며, UAV 제어 및 자원 분배 문제 등에서도 효과적으로 활용될 수 있는 장점이 있다 . 그러나, 이러한 방식들은 각기 탐색 다양성과 수렴 효율을 개선하는 데 기여하고 있음에도 불구하고 여전히 복잡한 구조와 매개변수 설계 부담이 크며, 실시간 UAV 제어와 같은 제약 조건이 많은 환경에서는 적용에 어려움이 있다. 따라서 본 연구에서는, 초기 단계에서 대규모 개체군을 생성한 뒤 비용 기준 상위 N개의 우수 개체만을 선별하여 고정된 탐색 집단으로 설정하고, 해당 집단 내에서만 변이, 교차, 선택 연산을 반복 수행하는 “Zone-Focused Differential Evolution(ZFDE)” 알고리즘을 제안한다. 기존의 GPS 기반이나 ROBL과 같은 초기화 중심 기법과 달리, 초기 탐색 공간의 다양성을 확보한 후 비용 기준 상위 우수 개체로 탐색 대상을 구조적으로 제한하여 반복 연산의 대상을 고정함으로써 계산 효율성과 수렴 속도를 동시에 극대화하는 구조적 차별성을 가진다. 즉, ZFDE는 초기화의 다양성만을 강조하는 GPS와 ROBL 기법과 달리, 탐색 과정 전반에서 연산 대상을 지속적으로 경량화하는 전략으로 실시간 제어 환경에 보다 적합한 실용적 구조를 제공한다. 또한, JADE, SHADE와 같은 적응형 차등 진화 알고리즘들이 매 반복마다 파라미터를 자동 조절하거나 외부 아카이브를 통해 탐색 다양성을 유지하는 구조를 가지고 있는 반면, ZFDE는 복잡한 메커니즘 없이도 탐색 성능을 유지하며 계산 부하를 줄일 수 있다는 점에서, 연산 자원이 제한되고 빠른 반응이 요구되는 UAV 환경에 더욱 적합한 최적화 전략으로 평가될 수 있다. 2.2 Differential Evolution (DE) 개요DE 알고리즘은 전역 최적화(Global Optimization)를 위한 Population 기반 메타 휴리스틱 기법에 해당하며 초기화, 변이, 교차, 선택의 네 단계로 구성된다[12]. · 초기화(Initialization): 탐색 공간에서 동시에 유지되는 후보 해의 개수를 의미하는 Population Size, 변이 연산에서 개체 간 차이를 조정하는 변이율(F, Mutation Factor), 교차 단계에서 사용되는 교차율(CR, Crossover Rate)을 바탕으로 DE 알고리즘을 몇 회 반복할 것인지에 대한 최대 반복 수(iteration number)를 정의하고 탐색 공간 내에서 무작위로 후보 해를 선택하며, 이를 기반으로 초기 개체군을 생성한다. · 변이(Mutation): 각 Population에 대해 무작위로 선택된 세 개의 개체를 활용하여 새로운 변이 벡터를 생성한다. 가장 일반적인 변이 전략은 ‘DE/rand/1'로, 이를 수식으로 나타내면 다음과 같다.
이때, [TeX:] $$V_i$$는 i번째 변이 벡터, [TeX:] $$X_{r 1}, X_{r 2}, X_{r 3}$$는 무작위로 선택된 서로 다른 Population, F는 변이율로 [0, 1]의 실수값을 갖는데 F가 클수록 탐색 범위는 증가한다. · 교차(Crossover ): 변이 벡터와 현재 벡터를 조합하여 자손 벡터를 생성한다. 이를 수식으로 나타내면,
(2)[TeX:] $$U_i= \begin{cases}V_i & \text { if } rand(0,1) \leq C R \text { or } j=j_{rand } \\ X_i & { else }\end{cases}$$이때, CR은 교차율로 [0, 1]의 실수값을 가지며 값이 커질수록 자손 벡터의 영향력이 커진다. [TeX:] $$j_{\text {rand }}$$는 1부터 파라미터의 개수 사이에서 무작위로 선택되는 정수로, 적어도 하나의 차원에서는 [TeX:] $$V_i$$이 선택되도록 하며, 이에 따라 [TeX:] $$U_i$$는 반드시 선택되는 값이다. · 선택(Selection): 자손 벡터([TeX:] $$U_i$$)의 적합도(fitness)가 부모 벡터([TeX:] $$X_i^{l+1}$$)보다 우수하면 부모를 대체한다. 이를 수식으로 나타내면 아래와 같다.
(3)[TeX:] $$X_i^{l+1}= \begin{cases}U_i & \text { if } f\left(U_i\right) \leq f\left(X_i\right) \\ X_i & { else }\end{cases}$$이떄, l은 현재의 반복 수를 뜻하며, f(x)는 비용 함수로써 다음과 같이 정의된다.
(4)[TeX:] $$\begin{gathered} f(x)=\int P\left\|x_{r e f}(t)-x(t)\right\|^2+Q\|u(t)\|^2 \\ +R \max \left(\left|x_{r e f}(t)-x(t)\right|\right) d t \end{gathered}$$이때, [TeX:] $$x_{r e f}(t)$$는 목표 자세, x(t)는 UAV의 실제 자세이다. 첫 번째 항은 실제 자세와 목표 자세 사이의 오차의 제곱합(ISE, Integral of Squared Error)을 의미하며 두 번째 항은 제어 입력의 제곱합을 의미한다. 세 번째 항은 목표 자세와 실제 자세 차이의 최댓값을 나타내는 Overshoot을 의미하며, P, Q, R은 각각 자세 오차와 제어 입력, Overshoot의 가중치를 의미한다. DE 알고리즘은 이러한 과정을 최대 반복 수만큼 반복하여 최적화를 진행하는데 이러한 간단한 구조와 전역 탐색 능력 덕분에 다양한 최적화 문제에서 널리 활용되고 있다. 2.3 UAV 자세 제어 모델UAV의 자세 제어는 Roll(롤, [TeX:] $$\phi$$) Pitch(피치, [TeX:] $$\theta$$), Yaw(요, [TeX:] $$\psi$$) 세 가지 축의 각도를 제어하는 문제로 정의된다. 이를 위해 UAV의 6자유도(6DOF) 동역학을 기반으로 이루어진다[3,13]. 본 연구는 UAV 중 쿼드로터 (Quadrotor)를 대상으로 하였으며, 이를 수식으로 나타내면 다음과 같다.
(5)[TeX:] $$\left\{\begin{array}{l} \ddot{x}=(\cos \psi \sin \theta \cos \phi+\sin \psi \sin \phi) U_1 / m \\ \ddot{y}=(\sin \psi \sin \theta \cos \phi-\cos \psi \sin \theta) U_1 / m \\ \ddot{z}=(\cos \phi \cos \theta) U_1 / m-g \\ \ddot{\phi}=\left[I U_2+\dot{\theta} \dot{\psi}\left(I_x-I_z\right)\right] / I_x \\ \ddot{\theta}=\left[I U_3+\dot{\phi} \dot{\psi}\left(I_z-I_x\right) / I_y\right. \\ \ddot{\psi}=\left[U_4+\dot{\phi} \dot{\theta}\left(I_x-I_y\right)\right] / I_z \end{array}\right.$$이때, m은 UAV의 질량, g는 중력가속도, [TeX:] $$U_1$$은 전체 추력(4개의 모터에서 발생하는 총 상승력), [TeX:] $$U_2, U_3, U_4$$는 각각 Roll, Pitch, Yaw에 대한 제어토크, [TeX:] $$I_x, I_y, I_z$$는 각 축에 대한 UAV의 관성모멘트를 의미한다. 이를 통해 UAV의 지면 기준 가속도 [TeX:] $$(\ddot{x}, \ddot{y}, \ddot{z})$$와 각 축 방향에 대한 각가속도[TeX:] $$(\ddot{\phi}, \ddot{\theta}, \ddot{\psi})$$를 계산하였다. 본 논문에서는 위의 동역학 모델을 기반으로 각 축별 오차 [TeX:] $$e_\phi, e_\theta, e_\psi$$를 최소화하는 방향으로 UAV PID 제어기를 설계하였다[3].
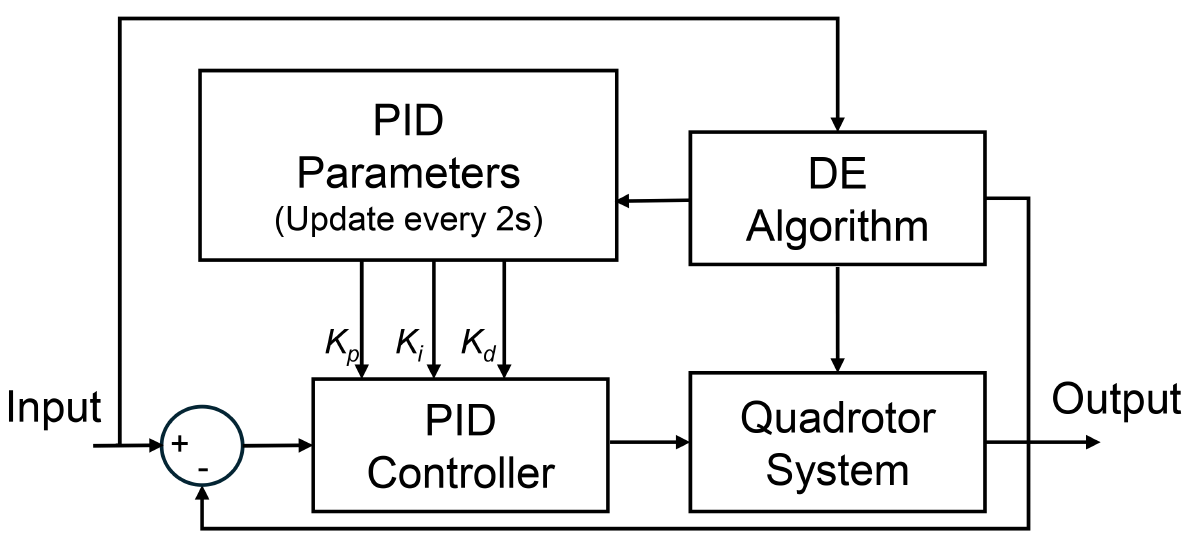
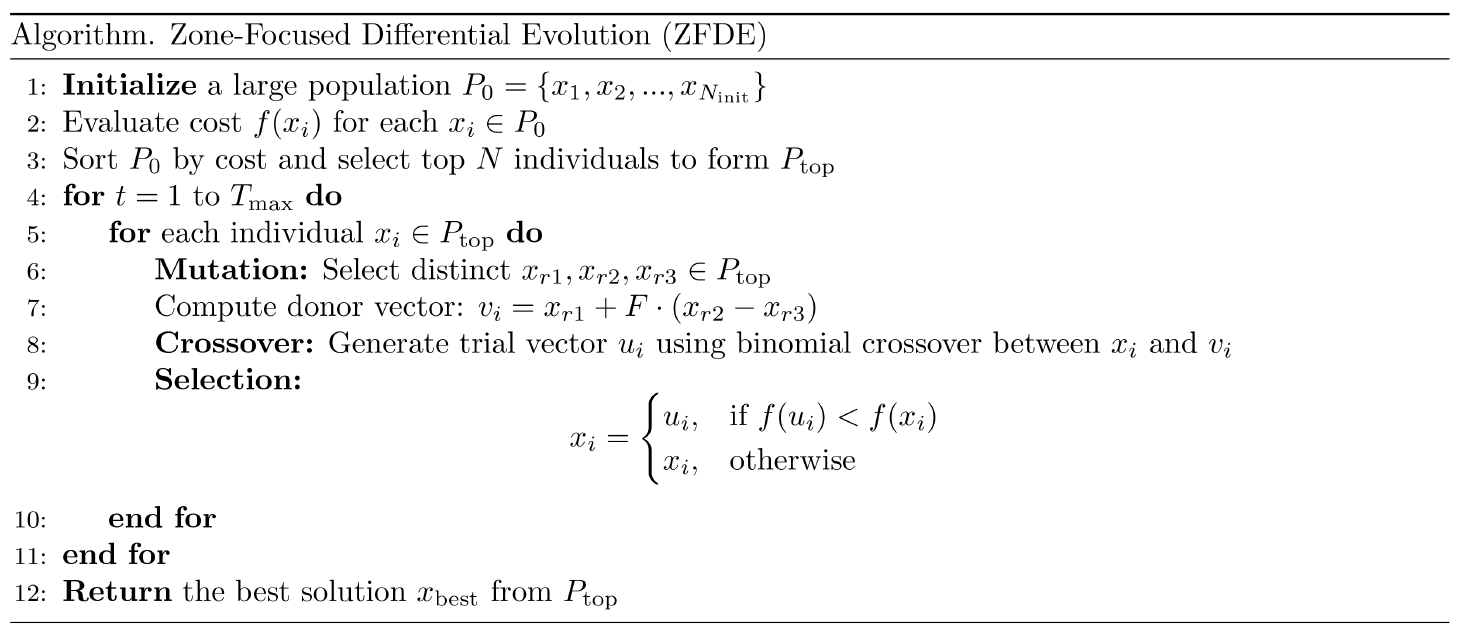
(6)[TeX:] $$\left\{\begin{array}{l} u_\phi=K_P\left(e_\phi\right)+K_i \int e_\phi d t+K_d\left(\dot{e_\phi}\right) \\ u_\theta=K_P\left(e_\theta\right)+K_i \int e_\theta d t+K_d\left(\dot{e_\theta}\right) \\ u_\psi=K_P\left(e_\psi\right)+K_i \int e_\psi d t+K_d\left(\dot{e_\psi}\right) \end{array}\right.$$이때, [TeX:] $$K_p, K_i, K_d$$는 각각 비례, 미분, 적분 게인이며, [TeX:] $${u}_\phi, {u}_\theta, {u}_\psi$$는 각 축별 제어입력을 의미한다. PID 제어기를 통해 각 게인을 최적화하며 이를 통한 UAV의 자세 안정성과 응답 성능 향상을 목표로 한다. 2.4 DE기반 UAV의 PID 제어기 설계DE 알고리즘은 UAV의 비행 동안 실시간으로 PID 게인 값[TeX:] $$\left(K_p, K_i, K_d\right)$$을 반복적으로 조정하여 제어 성능을 최적화한다. 본 논문에서는 DE 기반 최적화를 단순히 초기에 한 번 수행하는 것이 아니라, 비행 중에도 일정 주기마다 현재 UAV의 상태를 반영하여 PID 계수를 재조정하는 구조를 적용하였다. 실시간 DE 기반 PID 제어기는 다음과 같이 동작한다. 먼저 초기 개체군을 생성한 뒤, 변이, 교차, 선택 연산을 반복 수행하여 각 제어 주기(2초)마다 최적의 게인 조합을 도출한다. 그리고 새롭게 도출된 PID 계수는 곧바로 UAV에 적용되며 다음 제어 주기에는 직전 주기의 최신 상태(자세, 각속도 등)를 기반으로 다시 DE 최적화가 실행된다. 이러한 실시간 최적화 프레임워크의 구조를 정리하면 그림 1과 같다. Ⅲ. 제안 기법3.1 Zone-Focused DE 알고리즘본 논문에서 제안하는 Zone-Focused Differential Evolution(ZFDE) 알고리즘은 초기 탐색 공간의 다양성을 확보하면서도 계산 효율성과 수렴 속도를 향상시킬 수 있다. 이는 초기 단계에서 충분히 큰 개체군을 생성한 후, 그 중 비용 기준으로 성능이 우수한 상위 N개 개체만을 선별하여 이후의 DE 연산(변이, 교차, 선택)을 해당 집단 내에서만 수행하는 방식이기 때문이다. 기존 DE 알고리즘은 매 반복마다 전체 Population을 대상으로 변이 연산을 수행하거나, 동적으로 탐색 대상을 조절하는 방식이 일반적이었다. 그러나 본 연구에서는 초기 탐색 단계에서 충분한 다양성을 확보한 뒤, 정적인 우수 집단을 기반으로 안정적인 진화를 유도하는 구조를 채택하였다. 이는 변이 대상의 범위를 구조적으로 제한함으로써, DE의 탐색 효율을 개선하고 연산량을 절감하는 데 목적이 있다. 예를 들어, 초기 개체 수를 30개로 설정한 뒤, 비용 기준 상위에 해당하는 N개의 개체만을 선별한다. 이후의 모든 세대에서는 이 N개의 개체만을 대상으로 DE의 변이, 교차, 선택 연산을 반복 수행하게 된다. 이 과정에서 외부 개체는 추가되지 않으며, 진화는 고정된 우수 집단 내에서만 이루어진다. 이러한 구조는 탐색 초기에는 해 공간 전체를 넓게 탐색할 수 있는 기회를 제공하면서도 이후에는 고정된 탐색 영역 내에서 빠르고 안정적인 수렴을 가능하게 한다. 또한 변이 연산에 사용되는 개체 수가 줄어들기 때문에, 연산량 또한 일반적인 DE에 비해 현저히 낮아지게 된다. 이 방식의 주요 장점은 다음과 같다. 첫째, 초기 대규모 Population을 통해 탐색 공간 전반에서의 우수 해를 효과적으로 확보할 수 있다. 둘째, 이후의 연산은 제한된 집단 내에서 수행되기 때문에 계산량이 크게 줄어든다. 셋째, 우수 개체들로만 구성된 집단을 기반으로 하기 때문에 빠른 수렴이 가능하며, UAV와 같은 실시간 시스템에 적용하기 용이하다. 이를 의사코드로 나타내면 위의 Algorithm과 같다. Algorithm에서 [TeX:] $$P_0$$는 큰 Population 집단을, [TeX:] $$P_{top}$$은 [TeX:] $$P_0$$ 중에서 비용 기준 상위 N개의 Population을 의미한다. 또한, [TeX:] $$T_{max}$$는 DE 알고리즘의 최대 반복 수, [TeX:] $$x_{best}$$는 최적 비용을 가진 값을 의미한다. 이외의 변수들은 2.2절에서 설명한 바와 동일하다. 3.2 UAV 실시간 제어 시스템과의 적합성ZFDE 알고리즘은 복잡한 연산 구조 없이도 높은 탐색 성능을 유지할 수 있도록 설계되었으며, 이러한 특성은 실시간 제어 시스템에 매우 적합하다. UAV의 자세 제어와 같은 응용 환경에서는 제어 주기 내에 최적화 연산이 완료되어야 하며, 이를 위해 알고리즘의 연산량이 제한되어야 한다. 기존의 JADE, SHADE 등의 DE 변형 기법은 매 반복마다 파라미터를 적응적으로 조절하거나 외부 아카이브를 유지해야 하므로, 계산 비용이 증가하고 실시간 적용에는 제약이 발생할 수 있다. 반면, ZFDE는 고정된 우수 개체군만을 대상으로 연산을 수행함으로써 반복 간 계산 비용을 효과적으로 제한하고, 전체 연산 흐름을 간단한 구조로 유지할 수 있다. 따라서 실시간 반응성과 탐색 품질을 동시에 만족시킬 수 있는 실용적인 최적화 방법으로 평가될 수 있다. Ⅳ. 실험 및 결과4.1 실험 목적 및 구성본 실험의 목적은 제안한 ZFDE 알고리즘의 탐색 성능과 계산 효율성을 기존 DE 알고리즘과 비교하여 정량적으로 평가하는 것이다. 이를 위해 Population Size를 변수로 하여 세 가지 실험 조건을 설정하여 비교 분석을 수행하였다. DE와 ZFDE의 계산 효율성과 성능의 Trade-off를 정량적으로 비교하기 위해 (1) Population을 30으로 설정한 DE(DE_30)와, (2) Population을 10으로 설정한 DE(DE_10), (3) 30개 중 상위 10개만 집중 탐색하는 ZFDE를 직접 비교하였다. 첫 번째는 DE 알고리즘을 비교적 큰 개체군 크기(30개)로 운용한 조건이며, 두 번째는 동일한 알고리즘에서 개체군 크기를 10개로 축소한 조건, 마지막 ZFDE는 초기 개체군 30개 중 상위 10개만 선별하여 반복 연산에 사용하는 조건이다. 실험의 Population Size를 10~30 수준으로 설정한 이유는 일반적인 UAV PID 제어 환경에서 제한된 계산 시간 내에서 동작 가능한 튜닝 알고리즘이 요구되기 때문에, Population이나 Generation의 Size를 해당 수준으로 비교적 작게 설정하여, 적절한 UAV의 응답 성능을 보유하기 위해서이다[6]. 또한 DE의 반복 수 또한 10으로 작게 설정하여, 이러한 조건을 기반으로 비교적 빠른 수렴을 유도하였다. 또한, 변이율(F)과 교차율(CR)은 DE 알고리즘의 핵심 파라미터로, 본 연구에서는 기존 UAV PID 튜닝 및 실시간 최적화 관련 선행연구[6]에서 널리 사용된 [TeX:] $$F \in[0.5,0.9], C R \in[0.7,0.95]$$에서 실험적으로 안정적이고 빠른 수렴을 보여준 값(F=0.6, CR=0.9)을 선택하였다. 모든 알고리즘은 2초마다 PID 제어기를 실시간으로 업데이트하는 구조로 구현하였다. 즉, 각 제어 주기(2초)마다 현재 UAV 상태를 기반으로 개체군을 새롭게 평가 및 진화시키며, 해당 주기 내에서 도출된 최적의 PID 계수를 다음 2초간 실제 제어에 적용하였다. 요약하면, 본 연구에서 사용한 DE 계열 알고리즘의 주요 파라미터는 표 1에 정리되어 있으며, 모든 실험은 MATLAB R2023b 환경에서 수행되었고, Intel(R) Core(TM) i7-6700K CPU @ 4.00GHz, 16GB RAM을 탑재한 Windows 10 시스템에서 실행되었다. 표(Table) 1. DE 알고리즘에서 사용된 파라미터 (Parameters used by DE Algorithm)
4.2 실험 결과4.1절에서 설명한 바와 같이, UAV PID 게인 최적화 문제를 대상으로 DE_30, DE_10, ZFDE 세 가지 알고리즘의 성능을 비교·분석하였다. 각 알고리즘은 동일한 실험 조건에서 1000회 반복 실험을 수행하였으며, 그 결과를 최적비용의 평균, 표준편차, 주기 당 계산시간, Overshoot 및 반복 수별 최적 비용을 기준으로 다음과 같이 비교하였다. 표 2는 각 알고리즘 별로 도출된 성능, 즉 최적 비용(Best Cost)의 평균(Mean), 표준편차(Standard Deviation), 주기 당 평균 계산 시간(Computation Time)을 나타낸다. 표(Table) 2. 각 알고리즘별 성능 비교 (Performance Comparison of Each Algorithm)
실험 결과, DE_30의 최적 비용 평균은 DE_10과 ZFDE보다 각각 1.2%, 0.9% 낮고, 표준편차 또한 각각 75%, 50% 적어 가장 우수한 성능을 보였다. 그러나 평균 계산 시간이 제어 주기(2초)를 약 70% 초과한 약 3.4초로 실시간 운용 시에는 지연이 예상된다는 단점이 나타났다. 한편, DE_10은 평균 계산 시간이 가장 짧다는 장점이 있으나, 최적 비용의 평균 및 표준편차 모두 크게 나타나 비교적 불안정한 탐색 성능을 보였다. 표 3.은 UAV 자세 제어의 대표적 성능 지표인 Overshoot(세 축의 각도값이 목표값을 초과하는 정도)(%)를 보여준다. 각 알고리즘의 평균값 자체는 14% 내외로 유사하지만, 표준편차의 경우 DE_30과 ZFDE는 DE_10 대비 38%, 50% 감소, 최댓값은 각각 34%, 27% 감소하여 상대적으로 안정적인 제어가 예상된다. 하지만, 앞서 설명한 것처럼 DE_30은 제어주기(2초)보다 계산 시간이 커 실시간 제어에는 부적합하다. 표(Table) 3. 각 알고리즘 별 OverShoot 지표 비교 (Comparison of Overshoot Metric for Each Algorithm)
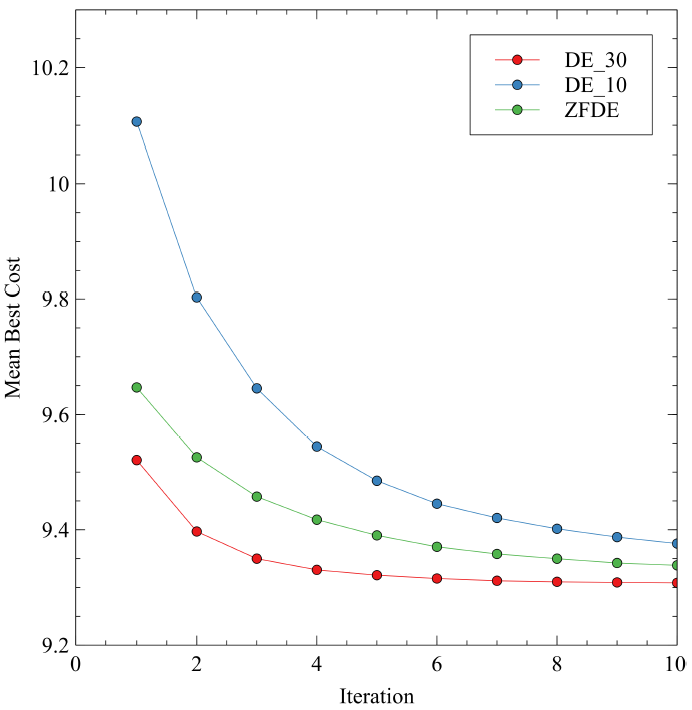
또한, 그림 2.은 최초 주기(0~2초)에서 DE_30, DE_10, ZFDE 세 알고리즘에 대한 평균 최적 비용의 수렴 경향을 반복 수 별로 시각화한 것이다. 동일 반복 수 기준 ZFDE는 DE_30에 비해서는 높지만 DE_10에 비해 전체적으로 낮은 비용으로 시작하며 더 빠르게 수렴하고 있으며, 특히 그 차이는 초반의 반복 구간에서 더 큰 차이를 보여준다. 이는 반복 횟수가 제한되는 실시간 UAV 제어 환경에서는 DE_10 보다 ZFDE가 더 실용적인 대안이 될 수 있음을 의미한다. 초기 수렴 속도가 빠르며, 소수의 연산만으로도 신뢰성 있는 탐색 결과를 도출할 수 있는 구조적 강점은 ZFDE의 중요한 장점으로 작용한다. 결론적으로, 본 논문에서 제안하는 ZFDE는 DE_10에 비해 훨씬 더 안정적인 제어 성능을 확보할 수 있으며, 개체군의 크기가 큰 DE_30과 비교해도 계산 속도 측면에서 분명한 이점을 가진다. DE_30은 다른 알고리즘에 비해 뛰어난 성능을 보이지만 그만큼 계산 시간이 길어 제어 주기(2초) 내 실시간 연산이 어려운 반면, ZFDE는 상대적으로 빠른 연산으로 실시간 제어에 적합함을 확인할 수 있었다. Ⅴ. 결 론본 연구은 UAV 자세 제어를 위한 PID 제어기 최적화를 목표로, 기존의 차등 진화(Differential Evolution, DE) 알고리즘을 구조적으로 개선한 Zone-Focused DE 알고리즘을 제안하였다. 기존 DE는 전역 최적화 능력이 우수하고 구현이 단순한 장점에도 불구하고 개체군 전체를 탐색 대상으로 하기 때문에 계산량이 많고 탐색 집중도가 낮아 실시간 제어 환경에는 한계가 존재한다. 이러한 문제를 해결하기 위해, 본 연구에서는 초기 단계에서 대규모 개체군을 생성한 뒤 비용 기준 상위 일부 개체만을 고정된 탐색 집단으로 활용하는 새로운 기법을 제안하였다. 제안 알고리즘은 변이 연산 시 탐색 대상을 구조적으로 제한함으로써, 탐색 효율성과 수렴 속도를 동시에 향상시키는 것을 목적으로 한다. 시뮬레이션 실험 결과, ZFDE는 기존 DE_10에 비해 더 낮은 평균 최적 비용을 달성하였으며, 특히 DE_30과 유사한 수준의 탐색 품질을 유지하면서도, 초기 대규모 개체군에서 선별된 우수 개체만을 대상으로 연산을 수행함으로써 계산 시간이 크게 절감되었다. 이러한 결과는 ZFDE가 탐색 공간 전반을 효과적으로 커버한 후, 고정된 Cost 상위 집단을 중심으로 안정적 수렴을 유도하는 구조적 강점을 가지고 있음을 시사한다. 결론적으로, 제안한 ZFDE 알고리즘은 실시간 UAV PID 제어기 최적화 문제에 있어 최적비용과 Overshoot을 기반으로 비교한 결과, 기존 DE 대비 안정적인 수렴, 감소된 연산량 측면에서 우수한 성능을 보였으며, 실시간 UAV 제어 시스템에 효과적으로 적용될 수 있는 가능성을 실험적으로 입증하였다. 향후 연구에서는 다양한 외란 조건(풍속 변화, 하중 변화 등) 하에서의 강건성을 분석하고 JADE, SHADE 등 적응형 DE 계열 기법과의 융합을 통한 성능 향상 및 하이브리드화, 실제 하드웨어 적용 실험을 통한 현장 적합성 검증 등을 통해 알고리즘의 실용성과 확장성을 더욱 고도화할 수 있도록 할 예정이다. BiographyBiographyReferences
|
StatisticsCite this articleIEEE StyleK. Shim and Y. Ko, "Zone-Focused Differential Evolution Algorithm for Enhancing Real-time UAV Attitude Control Performance," The Journal of Korean Institute of Communications and Information Sciences, vol. 51, no. 1, pp. 26-34, 2026. DOI: 10.7840/kics.2026.51.1.26.
ACM Style Kyou-Min Shim and Young-Bae Ko. 2026. Zone-Focused Differential Evolution Algorithm for Enhancing Real-time UAV Attitude Control Performance. The Journal of Korean Institute of Communications and Information Sciences, 51, 1, (2026), 26-34. DOI: 10.7840/kics.2026.51.1.26.
KICS Style Kyou-Min Shim and Young-Bae Ko, "Zone-Focused Differential Evolution Algorithm for Enhancing Real-time UAV Attitude Control Performance," The Journal of Korean Institute of Communications and Information Sciences, vol. 51, no. 1, pp. 26-34, 1. 2026. (https://doi.org/10.7840/kics.2026.51.1.26)
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||